
FASES DE VUELO
En un velero motorizado, las fases de vuelo evidentes y que seguro no se le escapan a nadie son:
– Modo Despegue: Activado al dar motor y hasta el corte del mismo. Buscamos los ajustes perfectos para una trepada imaculada.
– Modo Planeo: Es el modo por defecto. Ala limpia y modelo compensado para un planeo óptimo.
– Modo Aterrizaje: Permite desplegar los frenos para un aterrizaje de precisión alemana.
Bueno, y no se habrán roto la cabeza pensará alguno…..
Además de los modos anteriores, deberemos configurar el modelo para el vuelo en térmica, con velocidad más reducida y algo de flaps positivos para que el avión no entre en pérdida.
Igualmente deberemos tener un modo de vuelo rápido, con flaps negativos reduciendo la resistencia de nuestro perfil alar a velocidades altas para escapar de las descendencias, hacer transiciones rápidas o volar con viento fuerte.
– Modo Vuelo Lento: Flaps positivos regulables para parar el avión y explotar el centro de la ascendencia.
– Modo Vuelo Rápido: Flaps negativos para acelerar el avión y ofrecer menor resistencia alar.
Hasta aquí bien, pero hay más….
Extremadamente útil es el modo de Calibración. En un modelo con tantas superficies móviles y tanta mezcla inter actuando entre ellas, es necesario un modo que elimine todas las mezclas y que lleve a cada superficie la señal directa del stick; de forma que podamos centrar tranquilamente los servos sin preocuparnos de trims, mezclas ni leches. Perdón, se me ha escapado.
– Modo Calibración: Para el centrado de los servos y tareas de mantenimiento. Imposibilidad de activación involuntaria en vuelo.
Dicho esto…..
¡¡¡El orden de los modos de vuelo importa!!!.
OpenTx busca la condición que haga cierto el primer modo de vuelo, si no encuentra, busca la condición cierta del segundo modo de vuelo, etc. Si no encuentra ninguna condición cierta se activa el modo de vuelo por defecto, el modo cero.
Esto quiere decir que el orden en que dispongamos los modos de vuelo, implicará la PRIORIDAD de los mismos. En caso de que haya dos condiciones ciertas, OpenTx aplicará el modo de vuelo de menor número.
Mirad un ejemplo práctico para apreciar lo vital que puede llegar a ser lo explicado anteriormente:
Estamos intentando virar una térmica cerca del suelo y hemos desplegado los flaps seleccionando nuestro modo de vuelo lento (SB?).
Al final no conseguimos ascender y el viento ha arrastrado el modelo lejos del campo.
Necesitamos urgentemente dar motor si no queremos perder el modelo. Accionamos el interruptor SF?, que debería dar motor inmediatamente entrando en Modo Motor….
Pero mirad lo que puede ocurrir según el orden dado a nuestros modos de vuelo:
| Modos de Vuelo | Comportamiento | |
| Caso 1 | (SB?) Modo 1: Lento (SF?) Modo 2: Motor | Volamos con flaps positivos (SB?) en Modo Lento y al dar motor (SF?), no ocurre nada. El motor no se pone en marcha!!!.Desastre!!!!En este momento las condiciones de modo Lento (Flaps positivos) y de Motor son ambas ciertas, pero OpenTx aplica el de número más bajo. Aplica el Modo Lento.Sigue con los flaps abajo y no tenemos motor. Es necesario subir los flaps (SB-), el Modo Lento deja de ser cierto y entonces el motor se pondrá en marcha. |
| Caso 2 | (SF?) Modo 1: Motor (SB?) Modo 2: Lento | Volamos con flaps positivos (SB?) en Modo Lento y al dar motor (SF?), el avión inmediatamente arranca el motor y sube los flaps!!!En este momento las condiciones de modo Lento y de Motor son ambas ciertas, como en el caso anterior, pero esta vez el Modo Motor está por delante, y OpenTx entra en este modo sin más dilaciones. ¡¡¡¡Hemos salvado el modelo!!!!Además en Modo Motor hemos definido a través de una variable global que la deflexión de los flaps es nula, y por tanto sube los flaps aún estando SB?. |
Por tanto, y visto lo visto es mejor que ordenemos nuestros modos de vuelo según la prioridad que queramos darle:
Modo 0: Óptimo
Modo 1: Calibración
Modo 2: Motor
Modo 3: Aterrizaje
Modo 4: Lento – Flaps positivos
Modo 5: Rápido – Flaps negativos
El siguiente paso es asignarles los interruptores que activen estos modos de vuelo de forma que el paso de un modo a otro sea lo más automático posible.
Estos interruptores son completamente arbitrarios y pueden ser cambiados al gusto del consumidor según las preferencias de cada piloto. Sólo nos detendremos en calibración y aterrizaje, que merecen algo de atención.
Modo Calibración
Debemos asegurarnos que no se active en vuelo. Cualquier método puede ser bueno, pero nosotros os proponemos utilizar un interruptor lógico (L3).
Programaremos el interruptor L3 de forma que para entrar en el modo calibración tengamos que mantener el stick de dirección completamente a la derecha y el stick de alabeo completamente a la izquierda y accionar el interruptor momentáneo SH. Todo ello simultáneamente.
 |
Para salir de este modo, será necesario, simplemente, volver a pulsar el interruptor momentáneo SH una segunda vez.
 |
Pues manos a la obra:
Para mantener el modo calibración utilizaremos el operador Sticky en el interruptor lógico L3. Si recordáis…..
| Operadores Compuestos |
| Sticky: activado con V1 (interruptor físico/lógico o modo de vuelo), permanece cierto hasta que es desactivado por V2( interruptor físico/lógico modo de vuelo). Así la línea: |
| L3 Sticky V1: SH? V2: SA? | activa L3 al mover SH hacia abajo, y permanece activo hasta que SA sea llevado arriba. |
Hemos dicho que la condición de activación (V1) será que ocurran simultáneamente:
| Stick de alabeo completamente a la izq: | a?x Ail -100 |
| Stick de dirección completamente a la dcha: | a?x Rud 100 |
| Pulsar SH : | SH? |
Las tres condiciones se deben cumplir simultáneamente, por lo que las unimos con el operador AND.
a?x Ail -100 AND a?x Rud 100 AND SH?
OpenTX no permite ligar las tres condiciones directamente, así que tendremos que utilizar algún interruptor intermedio, como L2 en este caso, para agruparlas:
L1 cierto si a?x Ail -100 AND L2
L2 cierto si a?x Rud 100 AND SH?
L1 será nuestro activador, ya que será cierto cuando ocurran simultáneamente las tres condiciones mencionadas anteriormente.
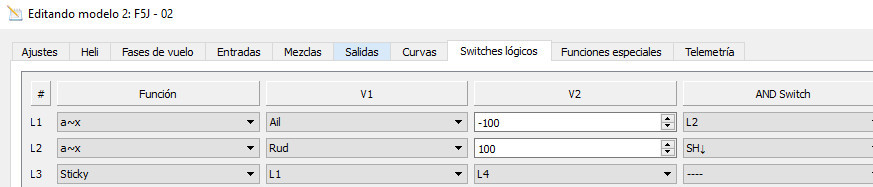
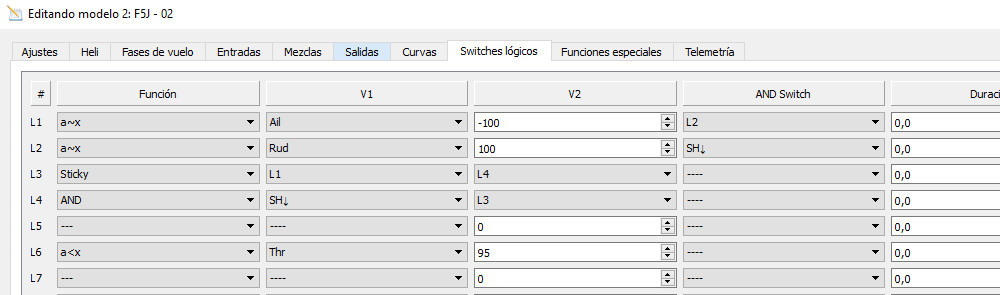
Así, nuestro interruptor L3 quedará de la siguiente manera:
| # | Función | V1 | V2 | AND Switch |
| L1 | a~x | Ail | -100 | L2 |
| L2 | a~x | Rud | 100 | SH? |
| L3 | Sticky | L1 | L4 | – – – – |
 |
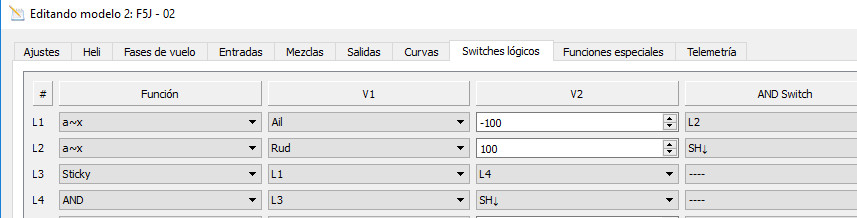
Para salir del modo Calibración bastará con que pulsemos SH nuevamente. Utilizaremos el interruptor lógico L4 como desactivador (V2), ya que en realidad, para salir hay camufladas dos condiciones:
| Estar en modo Calibración | L3 cierto |
| Pulsar SH | SH? |
Hacemos que L4 recoja ambas:
L4 cierto si L3 AND SH?
Así, cuando L3 sea cierto, porque estamos en Modo Calibración, y pulsemos SH; haremos cierto L4, nuestro desactivador, y saldremos de este Modo.
 |
Es muy recomendable que cuando estemos en modo calibración la emisora emita un aviso sonoro cada pocos segundo, de forma que ¡¡¡¡NOOOO!!! se nos ocurra salir a volar en estas condiciones. Crearemos la Función especial SF1 como aparece a continuación.
 |
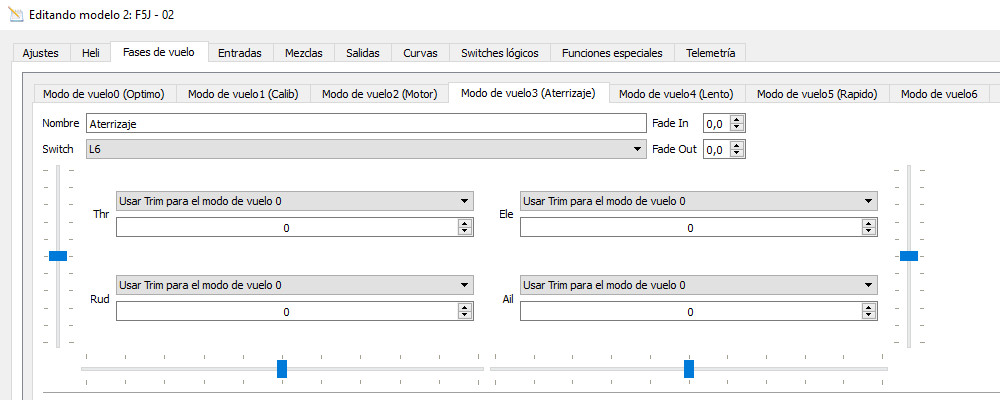
Modo Aterrizaje
En modo aterrizaje configuramos el avión para realizar una toma de precisión, en la que dispondremos de los frenos aerodinámicos. Estos son dirigidos por el stick de motor, siendo su punto superior completamente replegados y su punto inferior completamente desplegados.
Para que la entrada en modo aterrizaje sea lo más automático posible, haremos que esto suceda al bajar ligeramente el stick de motor desde su parte más alta . Y por supuesto para ello utilizaremos un nuevo interruptor lógico: L6.
 |
Manos a la obra:
Al mover ligeramente el stick de motor hacia abajo entraremos en modo aterrizaje…..Podríamos decir también que estaremos en modo aterrizaje cuando el stick de motor se encuentre por debajo del 95%. Y si L6 es el interruptor que hemos designado para tal fin, entonces:
L6 cierto si Thr < 95
| # | Función | V1 | V2 | AND Switch |
| L6 | a<x | Thr | 95 | – – – – |
 |
Este caso ha sido mucho más fácil de programar.
Para terminar con el tema de las fases de vuelo adjunto los interruptores que he usado para la programación de los mismos, pero que son completamente adaptables al gusto de cada piloto.
| FASES DE VUELO | INTERRUPTOR | |
| Fase 0 | Óptimo | —– |
| Fase 1 | Calibración | L3 |
| Fase 2 | Motor | SF? |
| Fase 3 | Aterrizaje | L6 |
| Fase 4 | Lento – Flaps positivos | SB? |
| Fase 5 | Rápido – Flaps negativos | SB? |
 |
 |
 |
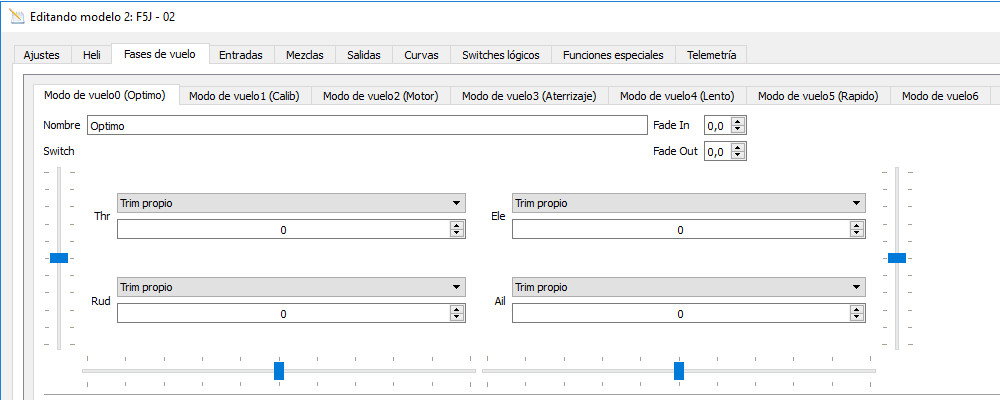
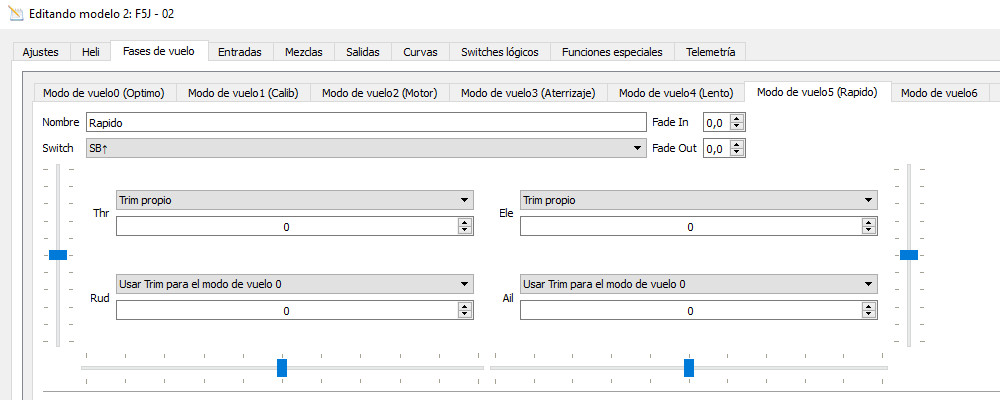
Y una última consideración antes de terminar. En cada modo de vuelo debemos indicar el papel que deben jugar los diferentes trims.
Por defecto, los trims de cada modo de vuelo vienen unificados con valor el dado en el Modo de Vuelo 0 (modo por defecto). Aparece como «Usar trim para el modo de vuelo 0» . Esto hace que si variamos el trim en un modo de vuelo determinado, lo variamos también en el resto de los modos de vuelo. El Trim está unificado.
Este comportamiento nos ahorra mucho trabajo en trims como el de alabeo. El trimado de alerones es el mismo para los diferentes modos de vuelo. Basta que ajustemos el alabeo en un modo de vuelo y lo tendremos ajustado en todos los demás.
Sin embargo, los ajustes de profundidad son distintos en cada modo de vuelo. Si mantenemos el trim unificado, el trimado de profundidad en un modo de vuelo desajustará el resto. Debemos individualizar el trim de profundidad en cada modo de vuelo. » Trim propio«.
Esto va también a gusto del consumidor, pero con carácter general yo recomendaría unificar alabeo y dirección, y mantener separados profundidad y motor.
 |
Profundidad porque cada modo de vuelo requiere un ajuste distinto y……
Motor porque como veréis más delante es un trim que no utilizaremos para ajustar el motor, sino que se convertirá en un control digital individualizado adicional dedicado a otras tareas…..
¡¡¡¡Seguid leyendo!!!!
Un saludo, Tiziano.
P.D.: Recuerda que puedes hacer tus comentarios o preguntas en el hilo del foro