
AJUSTES FINALES
Hemos creado un modelo muy sencillo con la ayuda de OpenTx Companion. Hemos comprobado con la ayuda del simulador que la programación se ajusta a nuestros requerimientos y llega el momento de realizar los últimos ajustes.
Dejaremos el mundo teórico de nuestro ordenador y comprobaremos, ya sobre nuestro modelo, el sentido de giro de los servos, su recorrido máximo, centrado de servos, etc
Lo primero que tendremos que hacer será pasar el modelo que hemos realizado en el ordenador a nuestra emisora. El procedimiento de conexión PC-Taranis se ha simplificado con las últimas versiones de OpenTX y en nuestro caso (versión 2.1.8) se realiza de la siguiente manera:
Con la emisora apagada, pulsamos los trims de dirección y alabeo hacia el interior, y manteniendo esta posición encendemos la emisora. Entrará en modo BootLoader tal como aparece en la siguiente imagen.
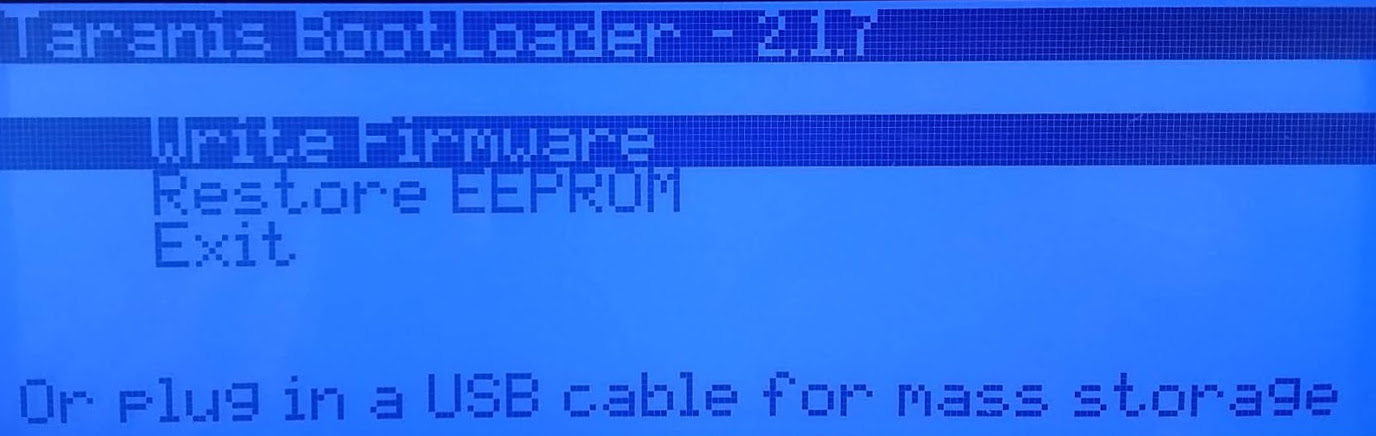 |
Ahora conectamos la emisora al ordenador a través de un cable mini-USB. Dejamos que el ordenador reconozca el nuevo dispositivo y cargue los drivers. Cuando esto ocurra, se abrirán dos carpetas; una correspondiente a la tarjeta de memoria MicroSD y otra titulada TARANIS que es la memoria interna de la emisora.
Es esta última la que nos interesa ya que contiene los ficheros:
FIRMWARE.BIN : sistema operativo de la emisora.
EEPROM.BIN : donde se encuentran los modelos de la emisora.
No es necesario que manipulemos las carpetas. Podemos hacer el trabajo desde OpenTx Companion. Así que abrimos el programa y realizamos las siguientes operaciones:
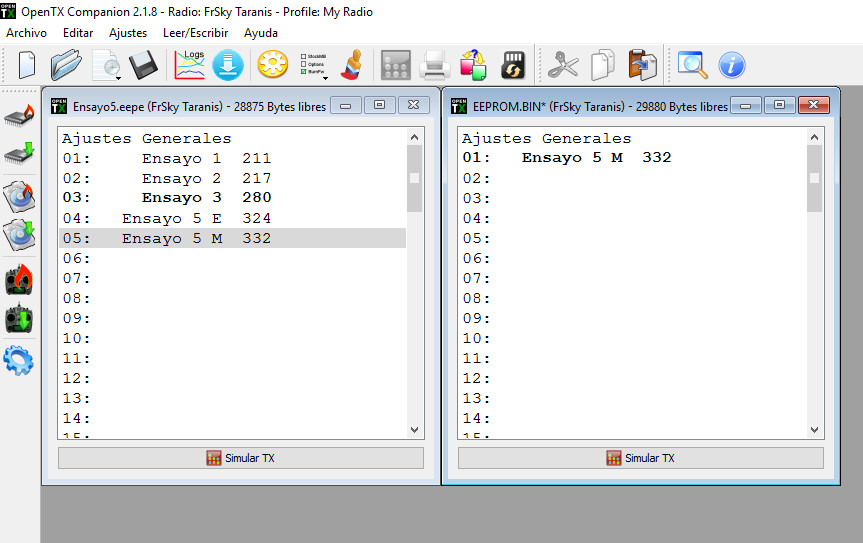
Con botón izquierdo pulsamos Archivo, luego Abrir y selecionamos el archivo donde guardamos el modelo programado con el ordenador (Ensayo 5.eepe, en nuestro caso). Veremos que se abre la ventana de modelos.
Repetimos la operación, pero esta vez abriremos la memoria de modelos de la emisora. Con botón izquierdo pulsamos Archivo, luego Abrir y seleccionamos el archivo EEPROM.BIN en la carpeta TARANIS de la emisora. Se abrirá la ventana de modelos guardada en la emisora.
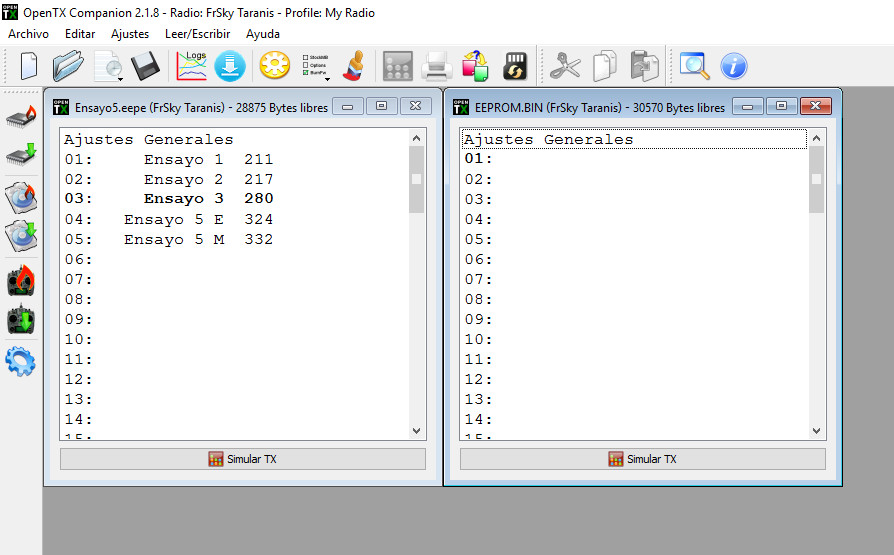 |
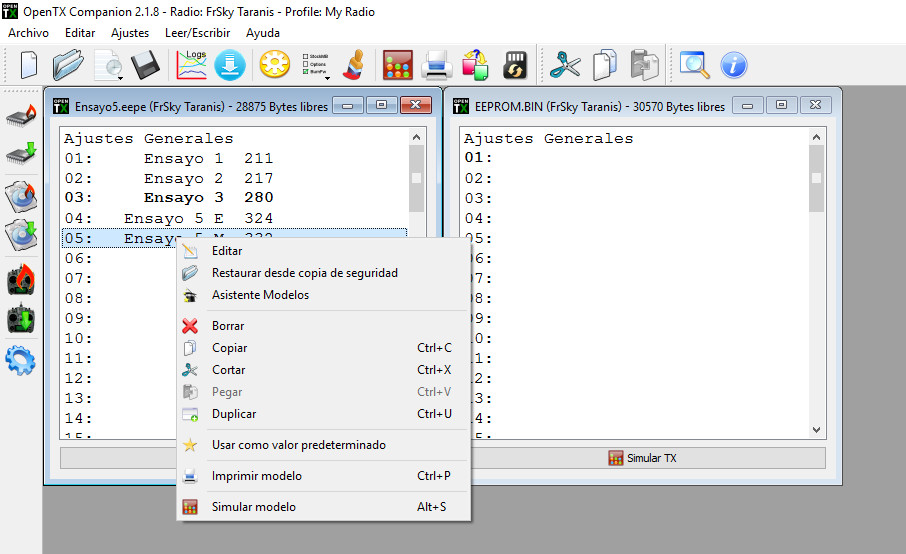
Tendremos en pantalla las dos memorias simultáneamente. Pulsamos con botón derecho en el modelo que queremos pasar, por ejemplo Ensayo 5 M, y en el desplegable elegimos Copiar.
 |
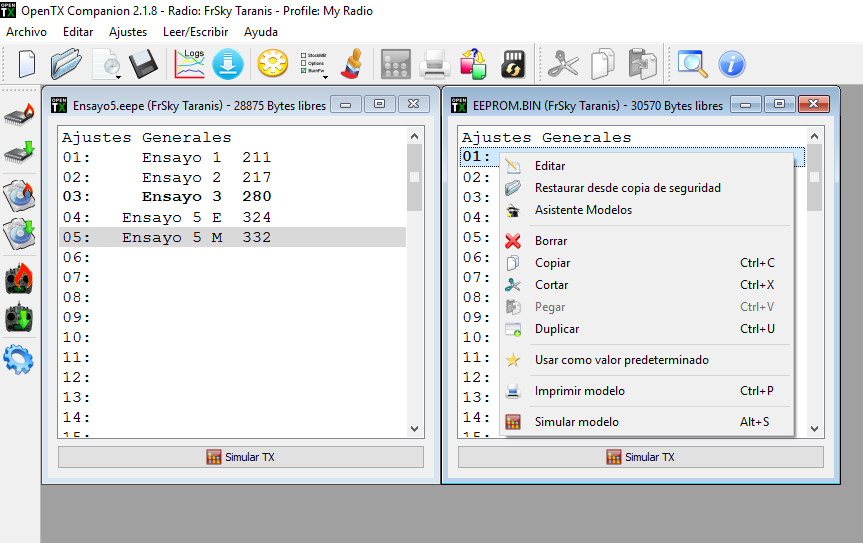
Seguidamente, con botón derecho pinchamos en la posición de memoria donde queramos almacenar nuestro modelo en la emisora, 01 por ejemplo, y seleccionamos Pegar.
 |
Guardamos los cambios en Archivo, Guardar o pulsando directamente en el icono del disquete en el menú horizontal.
 |
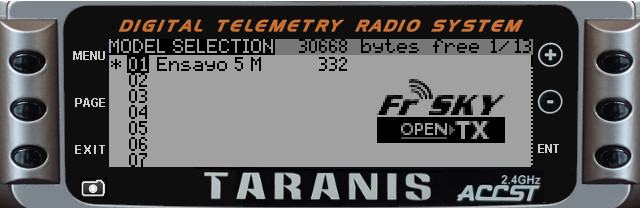
Podemos cerrar el programa y seleccionar extracción segura de dispositivos USB para evitar cualquier posibilidad de perdida de datos. Desconectamos el cable mini-USB y apagamos la emisora para salir del modo BootLoader. La próxima vez que encendamos la emisora ya estará nuestro modelo en memoria.
Para realizar los ajustes finales trabajaremos directamente en la emisora. Suponemos que el receptor ya está ligado a la emisora y los servos conectados en los canales adecuados según la programación realizada.
La primera comprobación necesaria es el sentido de giro de los servos. Centramos todos los mandos en la emisora antes de encender el receptor, y comprobamos que la deflexión de las superficies de mando es la correcta. En caso contrario, debemos invertir el sentido de giro del servo correspondiente de la siguiente manera. Pulsación corta en la tecla MENU para entrar en el menú de nuestro modelo.
 |
Pulsamos repetidamente la tecla PAGE hasta llegar a la página 7 que corresponde a los servos.
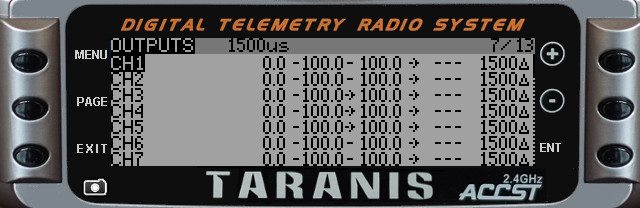 |
Con la tecla –, iremos bajando en el menu hasta situarnos en el canal del servo que necesite ser invertido. A efectos de demostración, supongamos que en nuestro caso sea la profundidad, situada en el canal 2, la que necesita ser corregida. Pulsamos la tecla –, nos situamos sobre el canal 2 y damos a ENT para editar dicho canal.
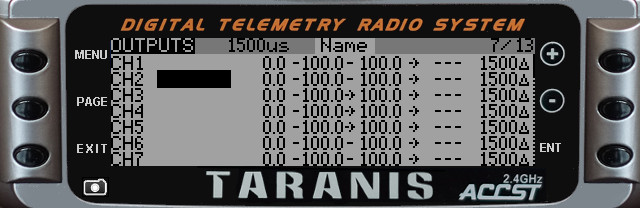 |
Apretando 4 veces la tecla –, nos situaremos sobre el campo Dirección.
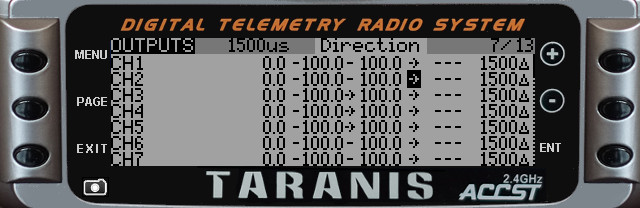 |
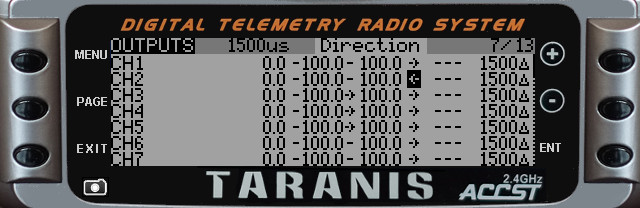
Apretamos ENT para cambiar el sentido. Despues EXIT para volver a la lista de canales donde podremos seguir navegando con las teclas +, –.
 |
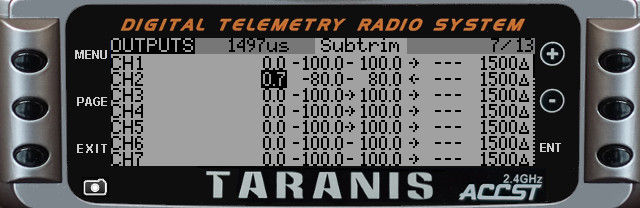
Ahora, que el sentido de giro es el correcto, es necesario determinar el recorrido de los servos, que puede ser conveniente limitarlo para evitar excesivo mando. Para ello, en esta misma página, iremos modificando los valores Min y Max de los canales que así lo requieran.
Por último, modificaremos el valor de Subtrim para ajustar el neutro en las superficies de mando.
A efectos de ejemplo, nosotros hemos seguido modificando el canal 2, limitando la deflexión y ajustando su centro como se ve a continuación.
 |
Este proceso debe ser realizado con cada uno de los canales utilizados, hasta que el avión quede completamente ajustado.
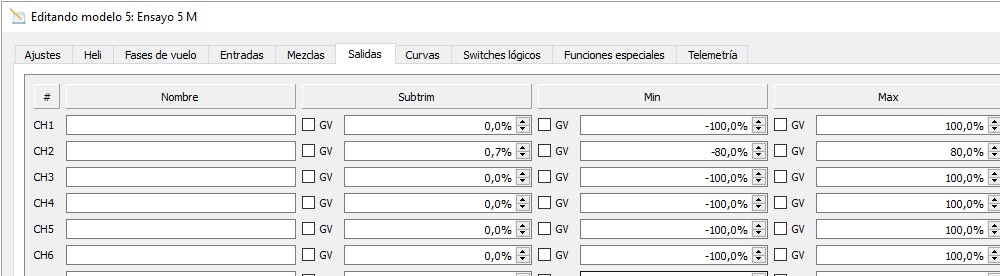
Al terminar no es mala idea, actualizar los datos introducidos en la emisora al modelo creado en el ordenador. Esto se realiza en la página Salidas de OpenTx Companion, como se ve en la siguiente imagen:
 |
Un saludo, Tiziano.
P.D.: Recuerda que puedes hacer tus comentarios o preguntas en el hilo del foro http://www.miliamperios.com/foro/post1356615.html#p1356615