
PROGRAMACIÓN DE LAS ENTRADAS
Nuestro punto de partida no es malo….. Pero ya nos conocéis, vamos a afinarlo un poquito más.
 |
DUAL RATES
Según el modo de vuelo en el que nos encontremos desearemos tener un cierto nivel de mando, es decir, desearemos tener Dual Rates, que serán programados a través de Variables Globales.
Por otra parte, con objeto de ahorrar el número de variables que debemos usar, agruparemos los mandos en verticales (profundidad) y laterales (alerones y dirección).
Los valores que demos a estas variables serán arbitrarios, según el gusto personal de cada piloto, pero en general deberán seguir estas pautas:
| Modo | Pauta | Valor |
| Óptimo | Deflexión mínima de Mandos. Tratamos de optimizar el planeo. Tenemos el ala completamente limpia, el avión estabilizado; y pretendemos minimizar las perdidas. Debemos usar poco los mandos y además con pequeñas deflexiones. | Vert: 50 Lat: 50 |
| Calibración | Deflexión máxima de mandos. Para calibrar los servos y ajustar los recorridos, necesitaremos dar mando a tope. | Vert: 100 Lat: 100 |
| Motor | El modelo debe comportarse alegre. A la salida tentremos poca velocidad y días de viento y turbulencia requieren una respuesta ágil del modelo cerca del suelo. | Vert: 70 Lat: 70 |
| Aterrizaje | Lo dicho antes aplica también en el aterrizaje. Cerca del suelo y con toma de precisión……necesitamos mando. | Vert: 100 Lat: 100 |
| Lento | Este modo de vuelo está pensado para las térmicas. Volaremos algo más lento por lo que necesitaremos más mando. Estamos con algo de flaps, así que la perdida de rendimiento no es primordial y se supone compensado por la térmica. | Vert: 70 Lat: 70 |
| Rápido | Para las transiciones rápidas necesitaremos acelerar el avión, los mandos serán más efectivos y no necesitaremos demasiada deflexión de los mismos | Vert: 50 Lat: 50 |
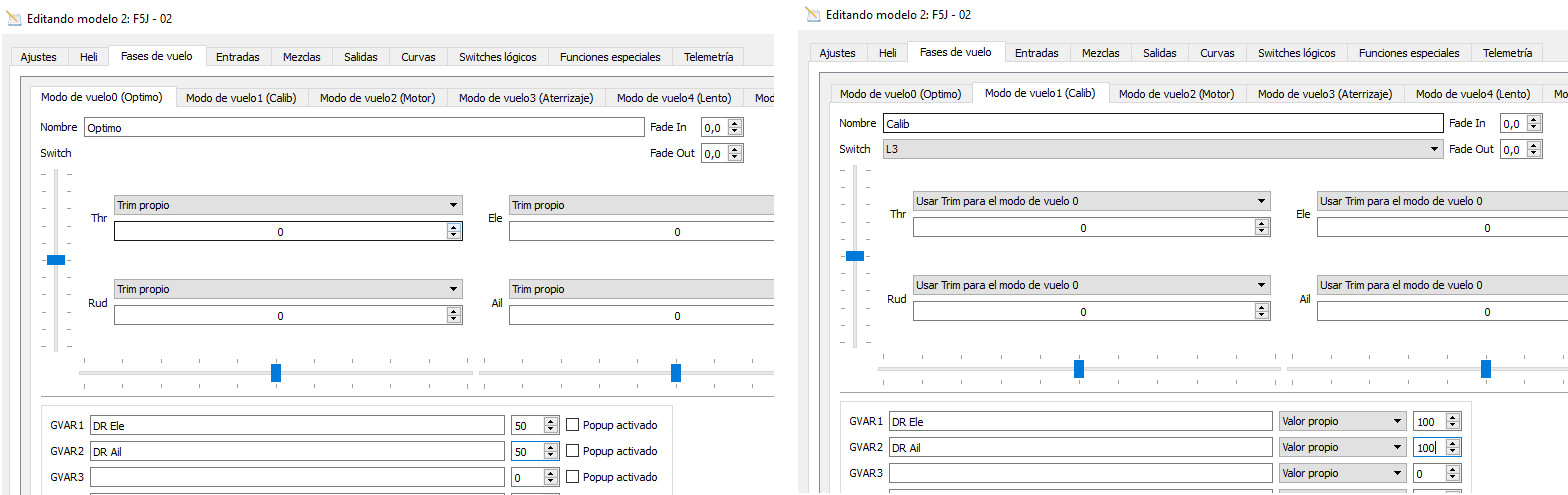
Para implementar los Dual Rates, iremos a la página de Fases de Vuelo y nombraremos las dos primeras variables globales como DR Ele y DR Ail respectivamente.
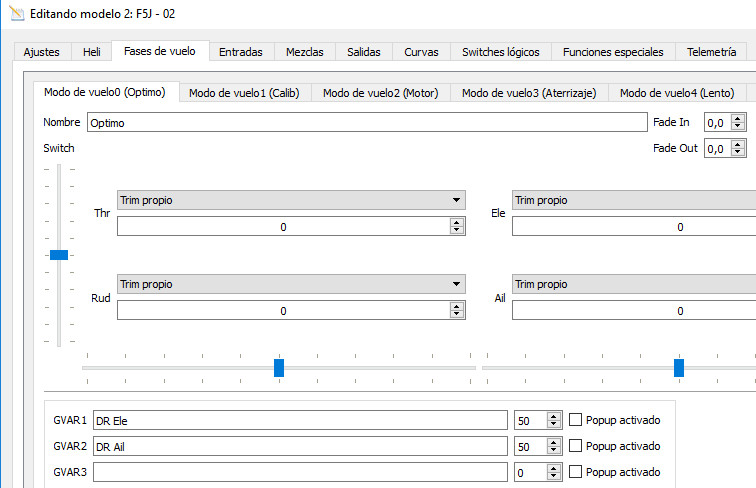 |
Como vemos en la imagen, les podemos asignar ya el valor que habíamos planeado darles en el Modo de Vuelo Óptimo: DR Ele = 50% y DR Ail = 50%
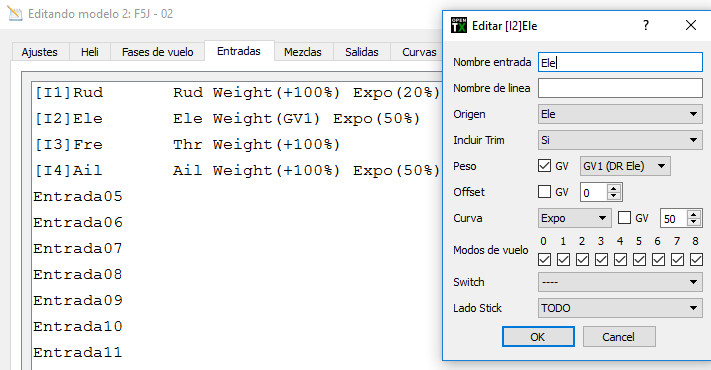
Seguidamente, iremos a la página de Entradas para asignar el Peso de cada entrada a su correspondiente Variable Global.
Editamos la Profundidad [I2]. En el campo Peso activamos GV y seleccionamos la Variable Global 1 (GV1) como vemos en la imagen.
 |
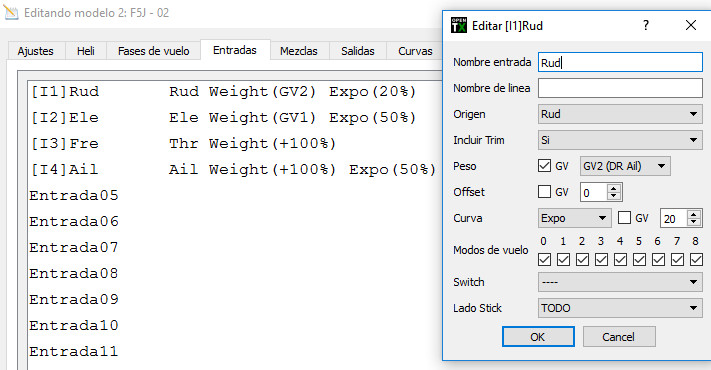
Repetimos el proceso, pero esta vez asignando la Variable Global 2 (GV2) al Peso de la Dirección [I1] y del Alabeo [I3].
 |
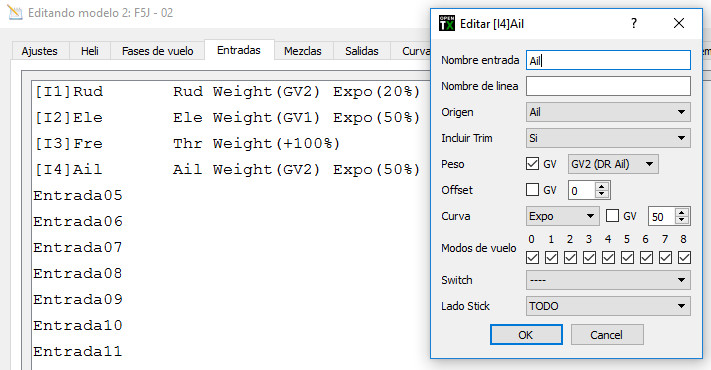 |
Ahora sólo queda asignar los valores deseados, para cada modo de vuelo, a estas dos variables globales. Estos serán los valores de nuestros Dual Rates para cada Fase de Vuelo.
| Óptimo | Calibr | Motor | Aterrizaje | Lento | Rápido | ||
| GVAR 1 | DR Ele | 50 | 100 | 70 | 100 | 70 | 50 |
| GVAR 2 | DR Ail | 50 | 100 | 70 | 100 | 70 | 50 |
Para ello, iremos seleccionando cada una de las pestañas correspondientes a los diferentes modos de vuelo e introduciremos los valores de GVAR 1 y GVAR 2.
 |
¡¡¡¡Ey!!!! Nosotros solo os hemos mostrado dos de las fases por vaguería….. pero vosotros no olvidéis rellenar el resto.
IMPORTANTE : ¡¡¡Si alguna GVAR se queda con valor cero, no tendremos mando!!!
Hemos de asegurarnos que todos nuestros Modos de Vuelo tengan algún ¡¡¡¡valor!!!!
Si no tenemos mucha experiencia con nuestro avión y no sabemos muy bien qué valor dar a nuestros Dual Rate, siempre podremos ser conservadores e introducir valor 100.
Éste corresponde a todo el mando posible y tras ensayos en vuelo podremos ir reduciendo el mismo para lograr los efectos deseados.
| Óptimo | Calibr | Motor | Aterrizaje | Lento | Rápido | ||
| GVAR 1 | DR Ele | 100 | 100 | 100 | 100 | 100 | 100 |
| GVAR 2 | DR Ail | 100 | 100 | 100 | 100 | 100 | 100 |
Antes de cambiar de tema…..
¿Os he dicho que nunca, nunca, debemos dejar cero «0» en ninguno de los modos de vuelo porque nos quedaremos sin mando?
Pues….eso.
ENTRADA DEL FRENO AERODINÁMICO
Por último nos ocupamos de [I3].
Recordad que el stick de motor [I3] lo nombramos Splr (Spoiler) y lo utilizaremos para desplegar los flaps cuando actúen como frenos.
El stick de motor no tendrá nada que ver con la planta de potencia, aunque en OpenTX se seguirá llamando Thr. Su posición normal de vuelo será completamente arriba, que corresponderá a la posición neutra de los flaps y tendrá un valor de salida de 80%.
Este valor tiene su razón de ser. Si el 100 es la posición más alta de los flaps, y decimos que 80 es la posición neutra, eso significa que nos reservamos 20% para flaps negativos y para que los flaps puedan colaborar con los alerones, actuando como flaperones.
A ver que os parece la siguiente película…..
Cuando comencemos a bajar el stick de motor, seguiremos dando una salida de 80 (Flaps neutros).
Al llegar al 95% del recorrido del stick, saltaremos automáticamente al Modo Aterrizaje, aunque todavía no habremos abandonado la posición neutra de los flaps.
Seguimos bajando el stick de motor y a partir del 90% y según sigamos bajando el stick, se irán desplegando las flaps/frenos hasta su posición más baja. ¿Mola?
A cámara lenta…..
| Stick MotorThr | Acción | Flaps | Salida [I3] |
| 100 | Stick arriba | Neutro | 80 |
| 95 | Entramos en modo aterrizaje | Neutro | 80 |
| 90 | Comienzan a desplegarse los flaps | Flaps descendiendo | 80? |
| -100 | Stick abajo | Frenos totalmente extendidos | -100 |
Bueno, pues este comportamiento que acabamos de diseñar es fácil de lograr si creamos una curva de tres puntos a tal fin.
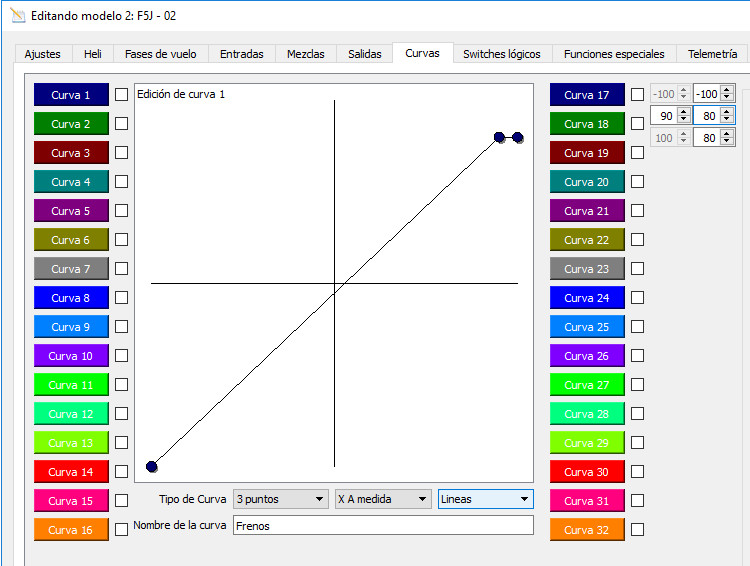
En la página de curvas, editaremos la primera de ellas y la nombraremos Frenos.
Si seleccionamos 3 puntos como tipo de curva, con X a Medida, esta se puede definir asignando los siguiente pares de puntos: (-100, -100), (90,80) y (100,80).
 |
Solo nos queda ligar esta curva al stick de motor.
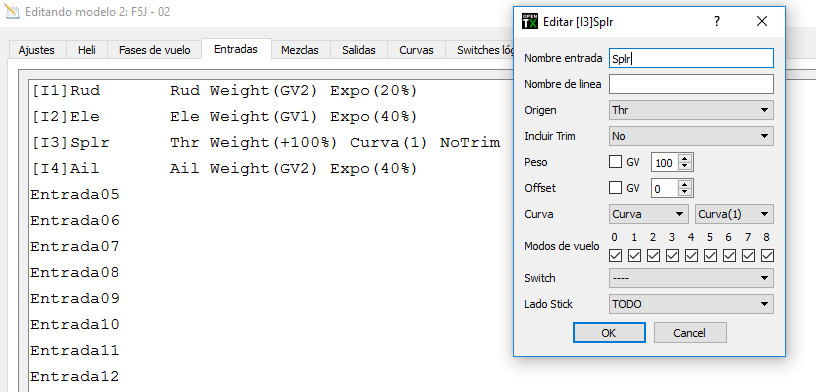
En la página de Entradas, editaremos la línea correspondiente al stick de motor [I3] Splr y seleccionaremos, en el campo curva, la curva 1 que hemos creado.
Importante también quitar el ¡¡¡¡trim!!!!
Como ya habíamos anticipado este trim no nos hace ninguna falta para este negocio y le daremos utilidad más adelante en otros menesteres bien distintos.
 |
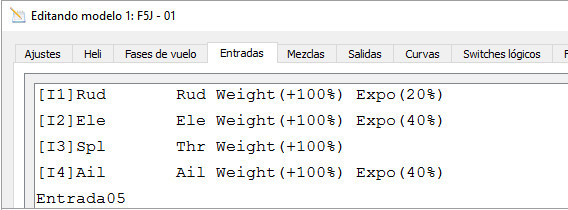
Bueno, y así quedan nuestras entradas. Nos hemos quedado sin mando de motor, pero no os preocupéis que esto lo arreglamos rápidamente en el siguiente tutorial.
Aprovechando…… quiero recordaros que ahora, Ele (posición del stick de profundidad), no es igual a [I2] Ele (entrada de profundidad), ya que a la posición del stick le aplicamos exponenciales y Dual Rates para tener una entrada de profundidad más elaborada.
De Thr (posición del stick de motor) y de [I3] Splr (entrada de frenos controlada por el stick de motor)…ni hablamos, ¿No? …….Pues eso.
Os espero para seguir leyendo……
Un saludo, Tiziano.
P.D.: Recuerda que puedes hacer tus comentarios o preguntas en el hilo del foro http://www.miliamperios.com/foro/post1356615.html#p1356615