
¡¡¡¡AJUSTES FINALES!!!!
Ya hemos establecido los ajustes básicos de servos que garantizan la integridad del sistema de control, conteniendo el recorrido de los servos al límite físico de la articulación, y también hemos asegurado la simetría de mandos y la sincronización de los flaps.
Ni mucho menos hemos terminado con el ajuste del modelo, ya que tenemos pendiente la optimización de las mezclas.
La programación que hemos estado desarrollando es bastante completa y también… bastante compleja. Tiene mil detalles ajustables para que nuestro modelo sea puro rendimiento.
Durante la programación hemos ido dando un valor orientativo a las Variables Globales, Pesos de Mezclas y Curvas que conforman todos estos detalles, pero es ahora, cuando tenemos el modelo montado, que debemos comprobar, corregir y ajustar estos valores.
Para empezar, no estaría mal recordar qué funciones hemos programado con parámetros variables…..
|
FUNCIÓN |
MODIFICA | PARÁMETRO |
|
D/R Profundidad |
Ajusta la cantidad de mando de profundidad | GVAR 1 |
|
D/R Lateral |
Ajusta la cantidad de mando de dirección y alabeo | GVAR 2 |
| Alerones→Dirección | Mezcla de Alerones con Dirección. Función Combi |
GVAR 3 |
| Diferencial Alerones | Asimetría en alabeo de los alerones |
GVAR 4 |
|
Diferencial Flaps |
Asimetría en el alabeo de los flaps | GVAR 5 |
|
Alerones→Flaps |
Mezcla para que los flaps ayuden en el alabeo | GVAR 6 |
| Flaps de alerones | Flaps preseleccionados en los alerones | GVAR 7 |
| Flaps de flaps | Flaps preseleccionados en los flaps |
GVAR 8 |
| Diferencial de cola | Asimetría en la dirección. Solo para cola en V |
GVAR 9 |
|
Compensador freno |
Mantiene la aptitud al desplegar los frenos | T2 |
|
Freno con alerones |
Sube alerones al desplegar el freno | Curva 2 |
|
Motor→Profundidad |
Mantiene la aptitud al dar motor | Pág. Mezclas |
|
SnapFlaps |
SnapFlaps preseleccionados |
Pág. Mezclas |
| Volumen Flaps | Modula flaps preseleccionados entre 20 y 100% |
LS |
| Volumen SnapFlaps | Modula SnapFlaps entre 0 y 100% |
S2 |
| Selector Velocidades | Velocidad de Máximo Planeo, Mínimo Descenso. |
SA |
Como veis, no son pocos los parámetros que podemos combinar para hacer que nuestro modelo vuele con el mejor rendimiento posible. La buena noticia es que la mayoría de estos parámetros son Variables Globales muy fáciles de modificar, in situ, desde la emisora.
SENSACIÓN DE MANDO
DUAL RATES
En discusiones anteriores decíamos que según el modo de vuelo en el que nos encontráramos, desearíamos tener un cierto nivel de mando, y que esta cualidad era controlada por los Dual Rates, que habíamos programado con las Variables Globales GV1 y GV2.
No voy a repetir nuestro planteamiento teórico inicial, pero sí a recordarlo con la siguiente tabla:
|
|
Óptimo | Calibr | Motor | Aterrizaje | Lento |
Rápido |
|
|
GVAR 1 |
DR Ele | 50 | 100 | 70 | 100 | 70 |
50 |
|
GVAR 2 |
DR Ail | 50 | 100 | 70 | 100 | 70 | 50 |
Es el momento de ajustar estos valores. Primero en tierra, comprobando que la deflexión de mandos es, a priori, la que deseamos; y posteriormente en vuelo (con SC↑ para que la participación de los flaps en alabeo no falsee el resultado), según nuestras sensaciones de vuelo.
La modificación de estos valores es incluso más ágil directamente en la emisora que a través de OpenTx Companion. Para ello abrimos el menú de nuestro modelo y nos situamos en la página de Variables Globales (Pág. 9), donde están agrupadas todas ellas dispuestas por modos de vuelo.
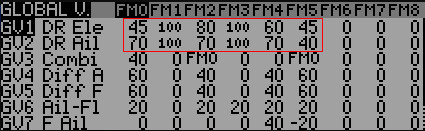 |
La imagen refleja datos reales de nuestro planeador en el menú de la radio que mencionábamos…..¡¡¡¡Ni se os ocurra copiarlo!!! Cada modelo y más aún, cada piloto, requerirá ajustes distintos según sus sensaciones de vuelo.
| Por ¡¡¡útima vez!!! |
| Los DUAL RATES nunca jamás never & never deben tener valor 0 |
VIRAJE COORDINADO
PARTICIPACIÓN DE FLAPS EN ALABEO
DIFERENCIAL DE ALABEO Y FUNCIÓN COMBI
DIFERENCIAL DE DIRECCIÓN
Un aspecto muy importante para sacar un buen rendimiento del planeador es minimizar las pérdidas en los virajes, es decir, lograr que los virajes sean coordinados.
Fijaos si es importante que tenemos dos funciones dedicadas a este fin:
- Diferencial de Alabeo: minimiza la guiñada adversa.
- Función Combi: compensa la guiñada adversa para obtener el viraje coordinado.
El ajuste de estas mezclas es fundamentalmente empírico (ensayo y error) y lógicamente debe hacerse en vuelo. Pero empecemos por el principio……
1.- FLAPS CON FUNCIÓN DE ALERONES
La variable global GV6 controla la contribución de los flaps en la función de alabeo.
Evidentemente, esta no es la función primordial de los flaps, aunque es cierto, que en veleros de gran envergadura, esta función puede hacer que nuestro velero sea mucho más ágil en los virajes.
Dicho esto, lo que buscamos es la menor contribución de los flaps posible para reducir las pérdidas, pero al mismo tiempo, que su efecto sea notable, que el alabeo sea mucho más alegre.
Lógicamente será en vuelo cuando podamos ajustar esta variable.
Tras haber trabajado los Dual Rates, deberíamos estar satisfechos con el comportamiento de los alerones….. así que nos concentramos en ajustar GV6 alternando SC↑ (flaps independientes) con SC- (flaps ligados) hasta cumplir nuestro objetivo.
En nuestro caso, el planteamiento inicial fue satisfactorio y un 20% de participación fue suficiente…..
2.- DIFERENCIAL DE ALABEO
Ambas funciones, diferencial y combi, son interdependientes y el ajuste de una afecta a la otra, así que empezaremos por esta, cuyo fin es reducir el efecto de guiñada adversa y por tanto, también la necesidad de aplicar dirección en el viraje.
Dado que tanto alerones como flaps pueden tener participación en el alabeo, nuestra programación utilizaba las Variables Globales GV4 y GV5 para establecer la cantidad deseada de diferencial en alerones y flaps respectivamente.
Empezaremos con el Diferencial de Alerones (GV4) y para ello seleccionamos SC↑ para que los flaps no colaboren en la función de alabeo.
Pondremos el avión en vuelo y llevando el stick de alabeo de un lado al otro alternativamente sin tocar la dirección, buscaremos el valor de GV4 que mantenga la aptitud, es decir que la maniobra no levante/baje el morro. Sería como si iniciáramos un tonel sobre el eje.
Tomamos este valor como referencia, para nuestro modo de vuelo óptimo, sin embargo, dado que el diferencial reduce ‘el nervio’ en alabeo, puede que deseemos reducirlo para volar en térmica (modo de vuelo lento), o incluso eliminarlo durante el aterrizaje…..
Vamos ahora con el diferencial de flaps. Como punto de partida copiamos los valores de diferencial de alerones (GV4) en el diferencial de flaps (GV5) y nos preparamos para probar en vuelo…..
Esta vez ponemos SC- para que los flaps participen y repetimos la operación, ajustando, si fuera necesario, GV5 a nuestra conveniencia.
3.- FUNCIÓN COMBI
Así es como llamamos a la mezcla de alerones con dirección. El objetivo de esta mezcla es lograr un viraje coordinado utilizando únicamente el stick de alabeo.
Esta mezcla es especialmente útil en modo de vuelo óptimo, cuando tenemos lejos el velero y podemos confiar en ella para que el viraje sea óptimo. En modo aterrizaje, con el avión más cerca podemos asumir nosotros el mando y prescindir de la función.
Evidentemente, sólo podremos ajustar su valor en vuelo. Ahora que estamos satisfechos con los diferenciales, regularemos el valor de GV3 para que al actuar sobre alerones observemos un viraje perfectamente coordinado sin haber tocado el mando de dirección.
Podemos modificar la variable GV3 desde la página de variables globales, como hasta ahora, pero si recordáis, también podemos hacerlo seleccionando SD↓ y actuando sobre el compensador de motor T2 (tutorial para programar ajustes en vuelo). Ambos métodos son compatibles simultáneamente.
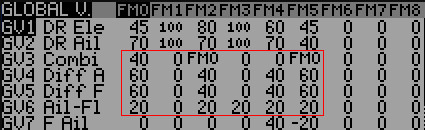 |
Después de tanto rollo, os dejo una idea de como pueden quedar estos ajustes en un modelo real, el nuestro. Espero que os pueda servir de guía pero recordad que vuestros ajustes pueden ser muy distintos…….
4.- DIFERENCIAL DE DIRECCIÓN (Sólo Cola en V)
En modelos con cola en V, al aplicar mando de dirección, es muy corriente que el modelo tienda a subir o bajar el morro y tengamos que corregir esta tendencia con mando de profundidad.
Para estos modelos de cola en V, hay una mezcla que tiene cierto efecto en los virajes y que corrige automáticamente ese cambio de aptitud….. el diferencial de dirección.
Como no podía ser de otra forma, nosotros ya habíamos incorporado esa mezcla en nuestra programación, y si recordáis la cantidad de diferencial de cola era almacenado en la variable global GV9.
El valor de GV9 debería ser tal que, al actuar sobre dirección pura (sin alabeo), el modelo mantenga la aptitud en todo momento. Evidentemente, la mezcla puede ser únicamente ajustada en vuelo. Así que, con valor inicial 0 iremos aplicando dirección a un lado y el otro y modificando la variable hasta nuestra satisfacción.
Por cierto, el cambio de comportamiento es muy notable y agradecido, así que no será difícil encontrar ese valor mágico. Veréis que hay un antes y un después….
Otro detalle, podemos modificar la variable GV9 desde la página de variables globales, como hasta ahora, pero si recordáis, también podemos hacerlo seleccionando SD? y actuando sobre el compensador de motor T2 (tutorial para programar ajustes en vuelo). Ambos métodos son compatibles simultáneamente.
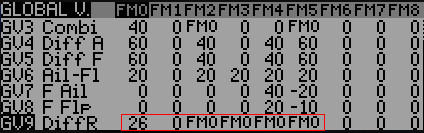 |
Este que veis es el valor que requiere nuestro modelo por si os sirviera de referencia.
Fijaos que para facilitar su ajuste todos los modos de vuelo, menos el de calibración, copian el valor de GV9 definido en el modo de vuelo óptimo (FM0).
AJUSTE DE FLAPS
FLAPS POSITIVOS-NEGATIVOS
SNAP FLAPS
Seguimos avanzando en la puesta a punto y llega el momento de revisar el funcionamiento de los flaps.
Variando la posición de flaps variamos nuestro perfil alar, adaptándolo y optimizándolo en todo momento a las condiciones de vuelo. Esta es una pieza fundamental y merece la pena dedicarles especial atención si queremos sacar todo el rendimiento del velero.
1.- FLAPS PRESELECCIONADOS. FLAPS POSITIVOS-NEGATIVOS
Dado que los alerones también pueden tener asignada la función de flaps, habíamos dedicado las variables globales GV7 y GV8 para almacenar la posición de flaps que corresponde a cada modo de vuelo en Alerones y Flaps respectivamente.
Ahora que tenemos el velero montado, nos aseguramos que LS esté arriba (100%) y comprobaremos si el valor asignado inicialmente a las variables, cumple las especificaciones del fabricante en cuanto a la deflexión de los flaps, modificándolas en caso de necesidad.
|
|
Óptimo | Calibr | Motor | Aterrizaje | Lento |
Rápido |
|
|
GVAR 7 |
F Ail | 0 | 0 | -10 | 0 | 30 |
-20 |
|
GVAR 8 |
F Flp | 0 | 0 | -5 | 0 | 15 |
-10 |
Posteriormente, en vuelo, podemos afinar estos valores si fuera necesario.
Por otro lado, hemos dispuesto que LS module entre el 20 y el 100% del valor nominal la deflexión de los flaps, por lo que tendremos control casi absoluto sobre los flaps.
Si desearais cambiar ese volumen de control, tendríais que modificar las siguientes líneas de la página de mezclas:
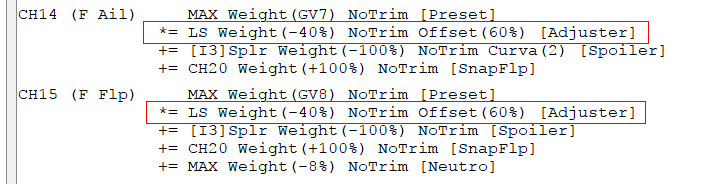 |
(Nota: para cambiar el sentido de LS, debemos cambiar el signo del peso del volumen de control)
Si os sirve de guía os enseño como quedó nuestro modelo real…..
Menos ¡¡¡Risas!!! ¡¡¡Ya sé que no hemos dejado ni una sola variable como estaba!!!
¡¡¡Puede que sea ese vuestro caso también!!!
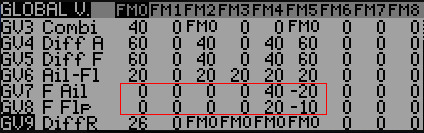 |
Os hago notar que en Modo Motor (FM2) no hemos necesitado flaps (valor 0) y que en Modo Rápido (FM5) definimos flaps negativos dando precisamente signo negativo a las variables globales.
2.- SNAP FLAPS
Esta función mezcla la profundidad con los flaps. Se trata de hacer que los flaps y alerones se muevan simultáneamente y en dirección opuesta a la deflexión del timón de profundidad, resultando en giros más cerrados especialmente en días con viento.
Si recordáis la mezcla estaba construida en el canal virtual CH20:
Bueno, pues con sólo echar un ojo ya veis que esta mezcla acepta dos posibles ajustes.
- Cantidad de mezcla – Valor Nominal: El peso de la primera línea de mezcla nos da la amplitud de respuesta de los SnapFlaps ante el movimiento de la profundidad.
Es posible que necesitemos menos desplazamiento del programado inicialmente, en cuyo caso disminuiremos tal peso, que debe tener siempre signo negativo.
| CH20 (SnapFl) | Ele Weight(-80%) Switch(SC?) Notrim [SnapFlp |
- Modulación: La mezcla está delimitada por un volumen de control, que, a través de S2, entrega entre el 0 y el 100% del valor nominal; tal como muestra la segunda línea de mezcla del canal CH20.
Si deseamos que, por ejemplo, S2 modifique el SnapFlap entre el 20 y el 100% del valor nominal, deberemos modificar este volumen de la siguiente manera:
| CH20 (SnapFl) | Ele Weight(-80%) Switch(SC?) Notrim [SnapFlp |
| *= S2 Weight(+40%) Notrim Offset(60%) [Adjuster |
Por otro lado, si necesitamos cambiar el sentido de modulación de S2, simplemente cambiaremos el signo del Peso en esta segunda línea.
Ambos ajustes son interdependientes. Posiblemente, modificando simplemente el volumen de control será suficiente para lograr nuestro objetivo. En cualquier caso, lo importante es conocer las posibilidades de la programación y que el resultado sea el deseado.
En esta ocasión, nuestro modelo no necesitó ninguna modificación, pero, por si fuera de utilidad, aquí os presento un caso real de otro de mis modelos, que sí que requirió ajustes:
 |
No hace falta que os diga que cualquier coincidencia con vuestras necesidades será pura casualidad……
COMPENSACIÓN POR POTENCIA
MEZCLA MOTOR-PROFUNDIDAD
Esta mezcla es muy corriente, no sólo en F5J, sino diría que en casi cualquier modelo. Se trata de que al aumentar el régimen del motor, el avión no cambie su aptitud. Para ello actuamos sobre la profundidad, picando muy ligeramente, a medida que aumenta el régimen.
Volviendo a nuestra programación, con SF↑ poníamos el 50% de potencia, y después con RS trabajábamos entre ese 50 y el 100% de potencia. Todo ello se puede ver en el canal del motor CH3:
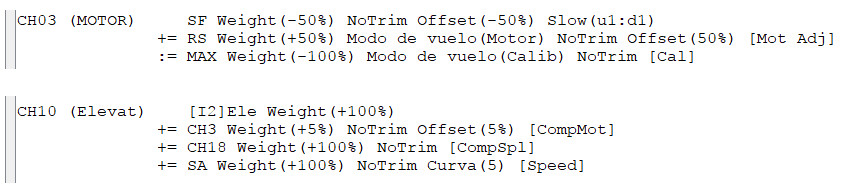 |
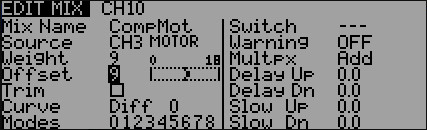
La mezcla de compensación la veis reflejada en la segunda línea del canal virtual de profundidad, CH10. Es muy muy leve. Su Peso es sólo del 5%, y tiene ese mismo Offset para que a motor parado la mezcla sea nula.
Para ajustar esta mezcla se necesitarán dos pasos:
• Trim Profundidad: en una primera fase, mantendremos RS abajo, de forma que la salida de potencia sea del 50%. En este punto actuaremos en el trim de profundidad, exclusivo al Modo de Vuelo Motor, hasta que el modelo mantenga el ángulo de deseado. Este es nuestro punto de partida.
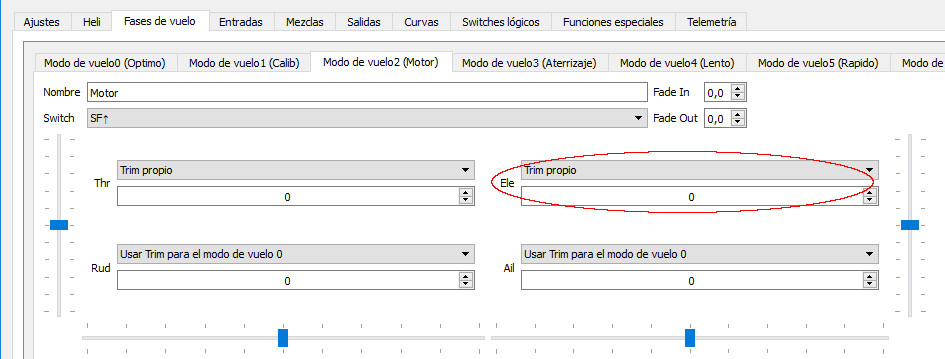 |
- Valor de la Mezcla: Satisfechos con el ángulo de trepada, iremos subiendo RS hasta alcanzar el 100% de potencia. Si la mezcla está bien ajustada, el modelo acelerará, pero no cambiará el ángulo de vuelo.
Es difícil que hayamos acertado con nuestro valor inicial, así que podemos ir cambiando el Peso de la Mezcla según nuestras necesidades. Recordad poner el mismo valor como Offset, de forma que a motor parado la mezcla siga siendo nula.
……Y volver a empezar desde el principio, puesto que al cambiar el Peso de la mezcla necesitaremos trimar nuevamente….
Por si os sirve de referencia, os adjunto la cantidad de mezcla que necesitó nuestro modelo.
 |
Weight = Offset
AJUSTE DE FRENOS
COMPENSADOR DEL FRENO/SPOILER
BUTTERFLY ALERONES
No descubriré nada si os digo que muchas competiciones F5J se deciden por la puntuación en las tomas de precisión. Y tampoco seré adivino si os digo que para las tomas de precisión es imprescindible una buena puesta a punto de los frenos aerodinámicos. Pues a ¡¡¡qué esperamos!!!
1.- COMPENSADOR DEL FRENO/SPOILER
Al desplegar los frenos, se produce un aumento brutal del momento alar que es necesario contrarrestar con la profundidad.
La corrección de este efecto, puede llegar a ser una pesadilla con otras emisoras, sin embargo, con Taranis va a ser pan comido como vais a ver.
Si recordáis, habíamos elegido el trim de motor, sin función propia, para controlar un volumen de control que modulaba la compensación del freno aerodinámico proporcionado por la curva 3……
 |
¿En Cristiano? Que el Trim Motor (T2) se encarga directamente de este ajuste.
Es tan sencillo como poner el avión en vuelo, ir bajando el stick de motor para entrar en modo aterrizaje desplegando los frenos y jugar con T2 (trim motor) hasta que el avión no varíe de aptitud al desplegar los mismos.
El ajuste es realmente rápido y sencillo. La dificultad, ahora escondida, era programar la emisora para que el ajuste fuera tan fácil.
2.- BUTTERFLY ALERONES
Puede que hayamos conseguido que el avión no varíe de aptitud al desplegar los spoilers, pero, aún así, que no baje como nosotros queremos……. aún tenemos otro arma para dejarlo todo a nuestro gusto.
Si recordáis, teníamos una mezcla programada para que al desplegar los frenos los alerones subieran simultáneamente.
Este truco reduce la sustentación y por tanto aumentamos el ángulo de descenso. Así es como estaba programado:
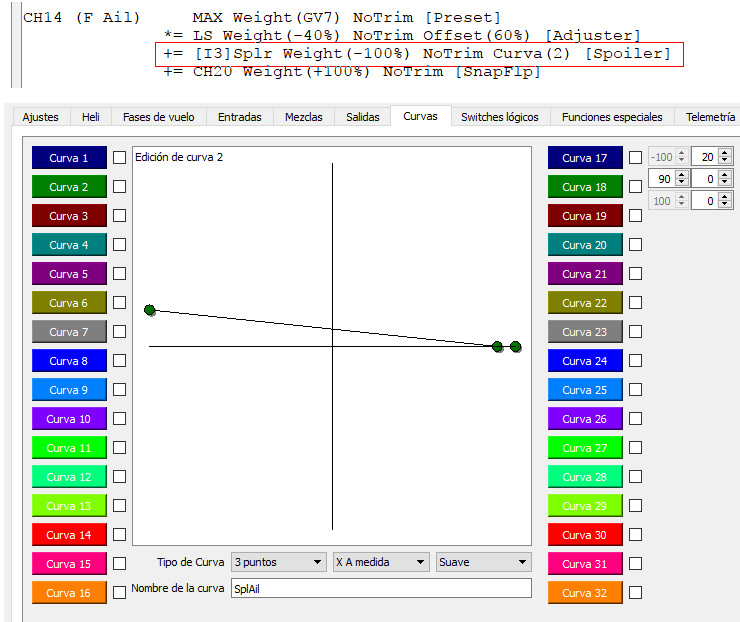 |
La Curva 2 controla el comportamiento de los alerones cuando han de actuar como orejetas.
Si sólo quisiéramos aumentar su efecto, simplemente deberíamos aumentar el valor 20, inicialmente asignado.
Para mayor satisfacción, el comportamiento lineal de los alerones puede ser educado para que sea exponencial, o que sólo entren en juego únicamente al final del recorrido del freno, o que……
SELECTOR DE VELOCIDADES
En capítulos anteriores vimos la posibilidad de optimizar las velocidades de planeo dependiendo de nuestras pretensiones. Así estudiábamos la velocidad de mínimo descenso o la de máximo planeo……
A fin de seleccionar las diferentes velocidades, designábamos el interruptor SA para conmutar automáticamente de una a otra, según el siguiente criterio.
| SA↑ | Velocidad para Transiciones / escapar de descendencias |
| SA- | Velocidad de Máximo Planeo |
| SA↓ | Velocidad de Mínimo Descenso |
Todo este planteamiento lo habíamos programado a través de la Curva 5:
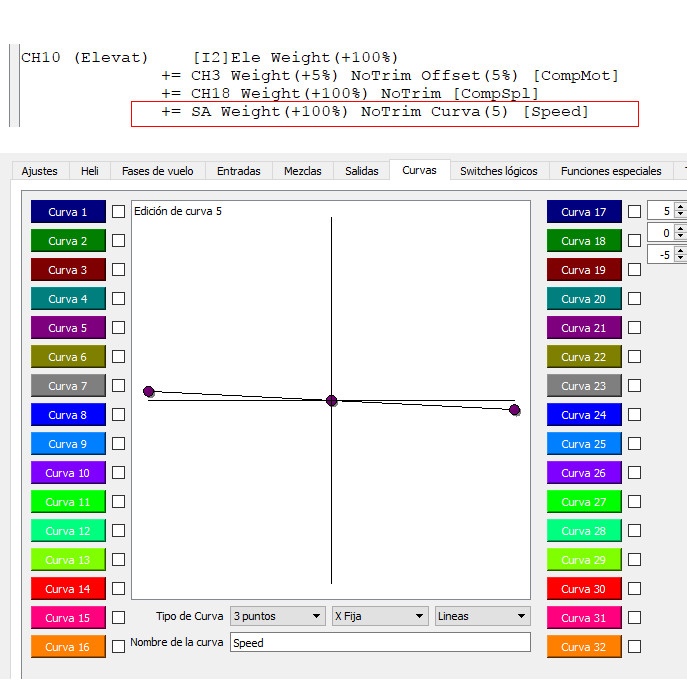 |
Dicho todo esto, el ajuste es muy evidente. Sobre la emisora, editaremos esta curva e iremos probando diferentes valores en los extremos de la misma hasta que sean de nuestra satisfacción.
Nuestro punto de partida, con SA-, es la velocidad óptima de planeo. Aquella con la que alcanzamos el Máximo Planeo. Nuestra misión será encontrar las velocidades por encima (para transiciones) y por debajo (velocidad de Mínimo Descenso) de esta que nos haga sentir cómodos.
Al final, cada piloto tendrá que buscar, en este punto y todos los tratados anteriormente, sus propias sensaciones. La programación de nuestra Taranis es tan moldeable que con total seguridad será capaz de implementar los deseos del más caprichoso de los pilotos.
 |
Tienes disponible esta entrada en fichero pdf 24. Ajustes finales.
Un saludo, Tiziano.
P.D.: Recuerda que puedes hacer tus comentarios o preguntas en el hilo del foro http://www.miliamperios.com/foro/post1356615.html#p1356615