
CURVA POLAR DEL PLANEADOR
Sin querer meternos en grandes explicaciones de aerodinámica, diremos que La Polar de un planeador es una gráfica que indica la tasa de caída correspondiente a cada velocidad de vuelo.
Se representa en unos ejes de coordenadas cartesianos en los que se establece la velocidad de vuelo en el eje positivo de las abscisas (generalmente expresadas en km/h), y la velocidad vertical de descenso en el eje negativo de las ordenadas (normalmente expresadas en m/s).
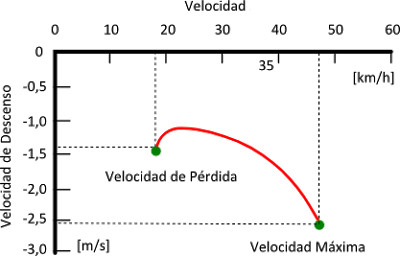 |
La imagen no es un ejemplo real, pero refleja la forma característica que tienen las polares.
Su extremo izquierdo corresponde a la velocidad de pérdida y el derecho a la máxima velocidad de diseño bien por cargas estructurales o por pérdida de alta.
Entre ambas……. la polar indica la velocidad de descenso que corresponde a cada una de las velocidades de vuelo del planeador en aire calma.
De estas gráficas nos interesan especialmente dos puntos, aquellos que nos dan la velocidad de mínimo descenso y la de máximo planeo.
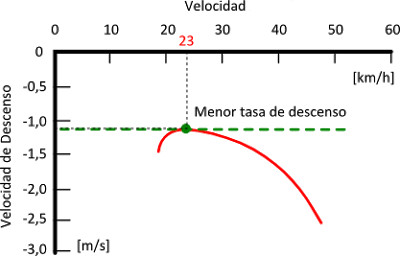 |
La tangente horizontal a la curva polar nos da la velocidad a la que debe volar el planeador para lograr el descenso mínimo.
¿Os imagináis la primera manga de un campeonato FAI F5J en un día sin térmicas ni viento?…… Pues sí. El que vuele a la velocidad que proporciona la mínima tasa de descenso ganará ¡¡¡¡la manga!!!!
Esta velocidad es siempre ligeramente mayor que la velocidad de pérdida.
La tangente desde el origen a la curva polar nos da la velocidad a la que obtendríamos el Máximo Planeo.
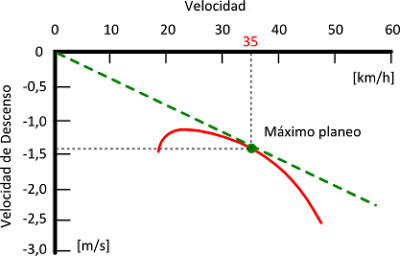 |
Digamos que esta es la velocidad óptima de vuelo. Aquella en la que obtenemos el máximo alcance con la altura que tengamos, siempre en aire calma. Es la velocidad óptima para explorar el campo de vuelo en busca de ascendencias, por tanto la velocidad a la que deberíamos tener trimado el planeador.
Hasta aquí todo muy fácil y muy bonito, pero ahora las malas noticias. Estas velocidades varían con viento o descendencias y además, ningún fabricante nos proporciona la polar de sus modelos.
A pesar de todo, deberíamos esforzarnos para trimar el modelo a velocidad de máxima fineza y tener algún recurso en la emisora para aproximarnos a la velocidad de mínimo descenso cuando la necesitemos.
Para aquellos que habían caído en la desolación….os diré que la Taranis, a través de la telemetría es capaz de discriminar estas velocidades a través de ensayos en aire calma. Podríamos de hecho calcular nuestra polar. Pero no hemos de anticiparnos…..
MEZCLA SELECTORA DE VELOCIDADES DE PLANEO
Lo que proponemos, por ahora, es crear una especie de compensador para pasar de una a otra velocidad según interese con el interruptor SA.
La idea es volar a Velocidad de Mínimo Descenso con SA↓. Pasar a Velocidad Óptima con SA- y volar por encima de esta velocidad para escapar de descensos o viento de frente con SA↑.
La forma de implementarlo en la emisora es muy sencilla, introduciendo una simple línea de mezcla en la profundidad.
| CH 10 (Elevat) | [I2] Ele Weight (+100%) Notrim |
| += CH3 Weight (+5%) Notrim Offset (5%) [CompMot] | |
| += CH18 Weight (+100%) Notrim [CompSpl] | |
| += SA Weight (+100%) Notrim Curva (5) [Speed] |
En el canal CH10 de la profundidad, añadiremos una nueva línea de mezcla, que hemos llamado Speed, con fuente SA, peso del 100% referida a la Curva 5. Es válida para todos los modos de vuelo y no necesita trim (No trim). Aseguraos que tenemos seleccionado AÑADIR en el campo opciones.
Los valores que nos harán pasar de una velocidad a otra estarán definidos en la curva 5 de tres puntos solamente.
Desgraciadamente no podemos anticipar los valores, que deberán ser ajustados de forma empírica, con ayuda de la telemetría y de ensayos de vuelo en aire calma.
Simplemente, y como punto de partida, daremos valor 5 a los extremos de esta curva.
Estos valores deberán ser modificados posteriormente según los resultados de vuelo. El punto central siempre deberá tener valor 0.
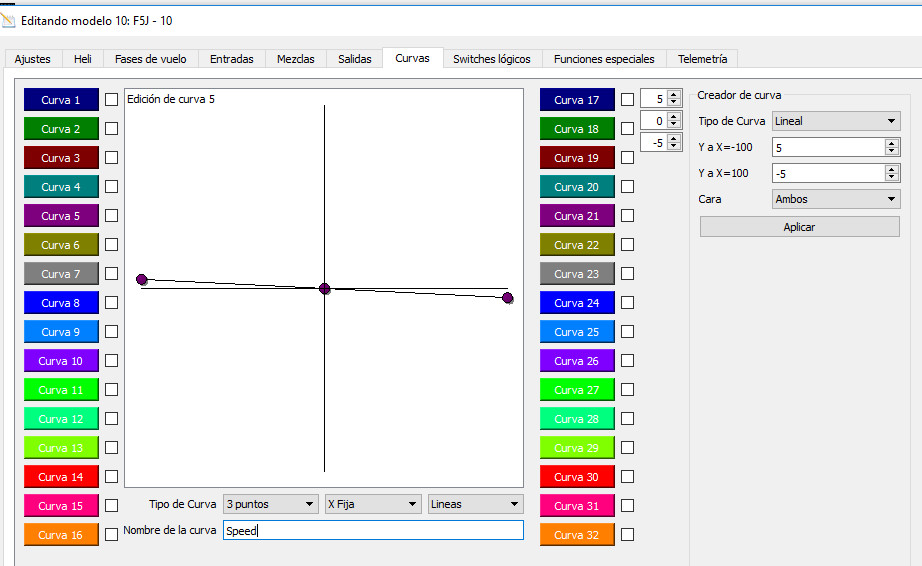 |
Seleccionamos tipo de Curva 3 puntos, la nombramos Speed y damos valor 5 y -5 a los extremos respectivamente, tal y como aparece en la imagen.
Como veis es muy sencillo de programar. Un poco más laborioso será dar con los valores mágicos que desvelen todo el potencial de nuestro planeador.
PROGRAMACION DE TIMERS
En F5J nos interesan dos tiempos. Primero el dedicado al motor, que no debe ser superior a 30 segundos y después el tiempo de trabajo, que empezará a contar desde la puesta en marcha del motor y termina a los 10 minutos.
Todo el merito está en el curro de los interruptores lógicos. Empezamos por el fácil ¿no?
El crono de 30 segundos hará una cuenta atrás cuando esté activado el motor (SF↑) y además no hayamos consumido el tiempo de motor (Temporizador 1, mayor que 0). Si dedicamos el interruptor lógico L12 a esta tarea:
L12 cierto si Temporizador 1 > 00:00:00 AND SF↑
En el idioma OpenTx:
| # | Función | V1 | V2 |
AND Switch |
|
L12 |
a>x | Temporizador 1 | 00:00:00 |
SF↑ |
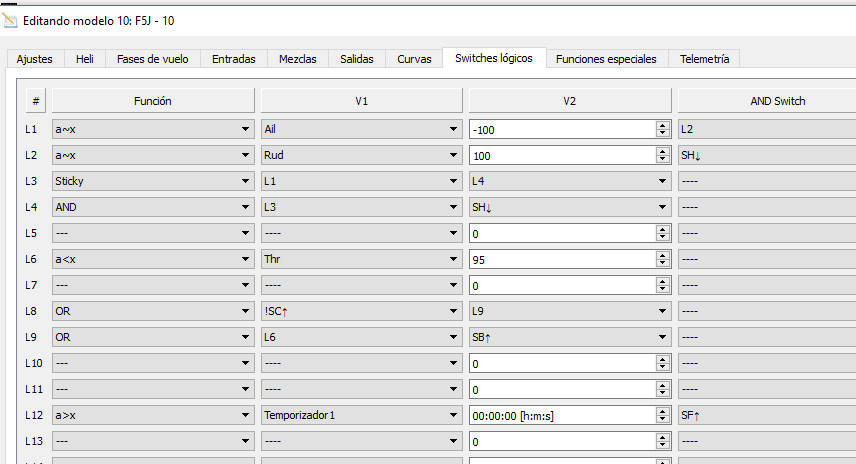 |
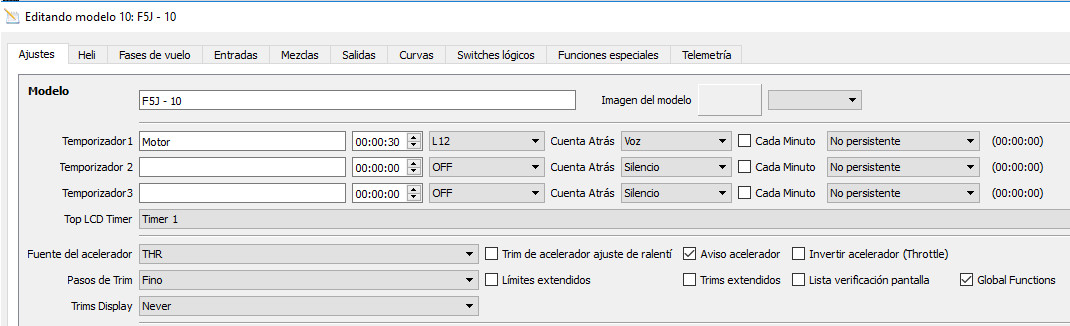
Ahora que tenemos el interruptor que activa el temporizador de los 30 segundos, podemos definir este último en la página de Ajustes.
Nombraremos al Temporizador 1 como ‘Motor’ y le asignaremos los 30 segundos dando el valor 00:00:30, siendo L12 el interruptor que lo activará. La cuenta atrás la podemos hacer a nuestro gusto por Voz o Beeps.
 |
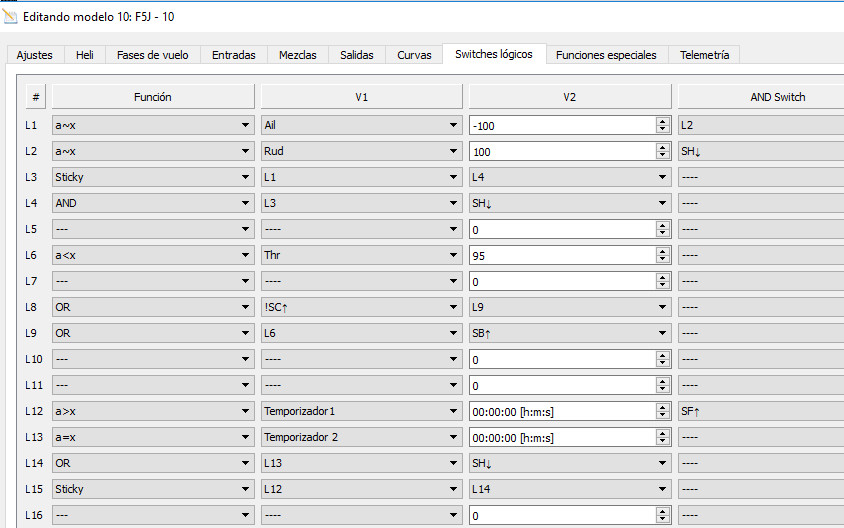
Para controlar el tiempo de trabajo podemos utilizar el operador Sticky, y necesitaremos definir la condición de inicio y de final de esta cuenta atrás.
El inicio es claro y aprovechando que ya definimos L12…. este nos puede hacer el servicio.
El final, pues cuando termine el tiempo de trabajo Temporizador 2 = 0, o también, cuando queramos re-iniciar la cuenta atrás para un nuevo vuelo actuando sobre el interruptor SH↓, aunque no hayamos completado el tiempo de trabajo.
L13 cierto si Temporizador 2 = 00:00:00
L14 cierto si L13 OR SH↓
Todo junto y en lenguaje OpenTx:
|
# |
Función | V1 | V2 |
|
L13 |
a=x | Temporizador 2 |
00:00:00 |
| L14 | OR | L13 |
SH↓ |
| L15 | Sticky | L12 | L14 |
 |
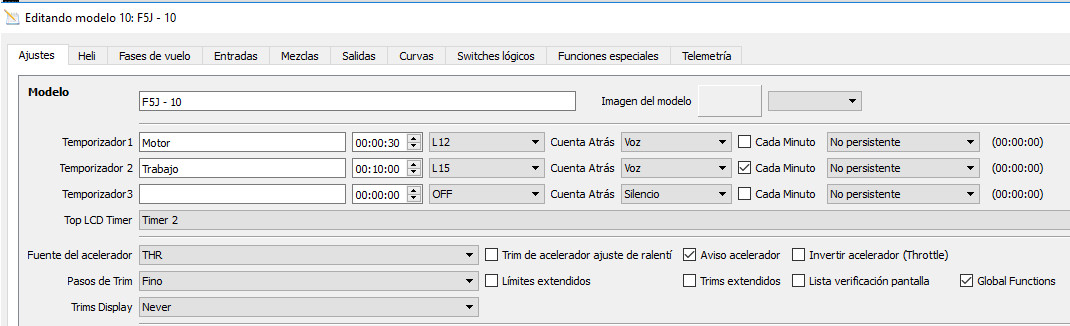
Ahora que tenemos el interruptor que activa el temporizador de los 10 minutos, podemos definir este último en la página de Ajustes.
Nombraremos al Temporizador 2 como ‘Trabajo‘ y le asignaremos los 10 minutos dando el valor 00:10:00, siendo L15 el interruptor que lo activará. La cuenta atrás la podemos hacer a nuestro gusto por Voz o Beeps con avisos cada minuto.
 |
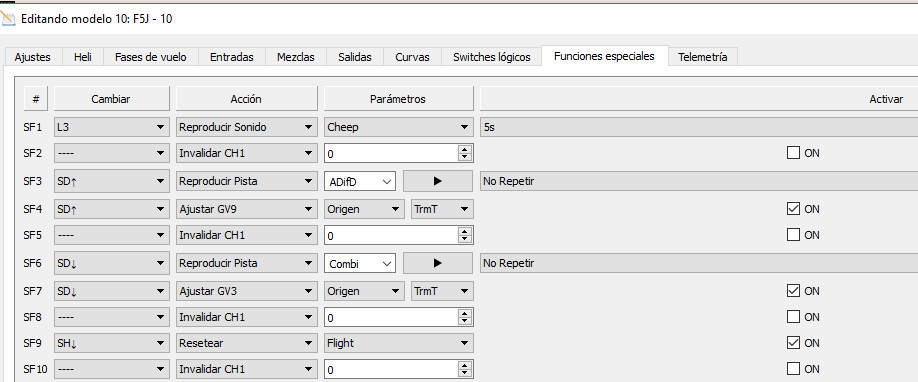
Por último…. ya hemos visto que nos interesa poder resetear los temporizadores para un nuevo vuelo, y eso lo hacemos a través de las Funciones Especiales.
Podemos definir la función SF9 para que al actuar sobre el interruptor SH↓ ejecute la función Resetear sobre todos los datos de vuelo (Flight), temporizadores, telemetría, etc. No olvidéis de Activar la función seleccionando la casilla ON.
 |
Tienes disponible esta entrada en fichero pdf 21. Curva Polar del planeador.
Un saludo, Tiziano.
P.D.: Recuerda que puedes hacer tus comentarios o preguntas en el hilo del foro http://www.miliamperios.com/foro/post1356615.html#p1356615