ADAPTACIÓN PARA EMPENAJE CONVENCIONAL
La programación que hemos estado desarrollando en estos tutoriales, correspondía a un modelo con cola en V. Lo habíamos elegido así por motivos didácticos, ya que este tipo de modelos es algo más laborioso de programar y nos daba oportunidad a hablar del diferencial de cola…..
Bueno, pero ahora que estamos llegando al final de la programación, y dado que la mayoría de los modelos que vemos en el campo montan la clásica configuración de estabilizador horizontal y vertical, vamos a indicar los cambios necesarios en la programación que hemos venido desarrollando para adaptarla a un modelo con cola en X.
COLA CONVENCIONAL
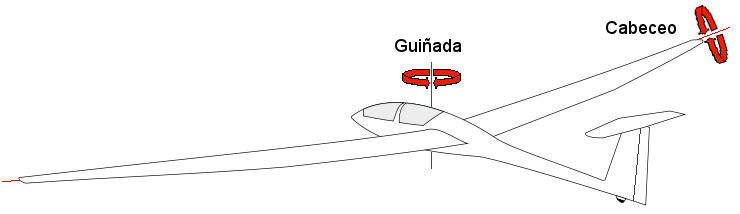
Conceptualmente, el empenaje clásico es mucho más sencillo. La profundidad, controlada por un único canal, será responsable del movimiento de cabeceo del modelo; y la dirección, también controlada por un único canal, se encargará de la guiñada.
 |
Afortunadamente, en nuestra programación para cola en V, habíamos creado unos canales altos – canales ‘virtuales’ – que representaban precisamente la profundidad y la dirección.
 |
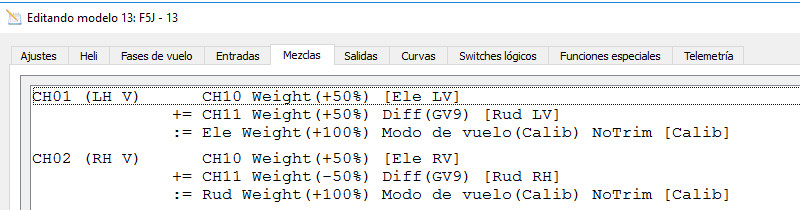
Así, el canal CH10 era la profundidad virtual con todas las líneas de mezclas que hemos visto, y por su parte, el canal CH11 correspondía a la dirección virtual, también con su mezcla con alerones (Función Combi).
Los llamábamos virtuales porque estos canales no tienen salida directa a ningún servo. Servían de base para que mezclados en los canales CH1 y CH2, que sí que tienen salida directa a un servo, creáramos la profundidad y dirección del modelo con cola en V.
Estos canales correspondían a las aletas izquierda y derecha respectivamente de la cola en V.
 |
Una vez que hemos recordado la situación de la que partimos, vamos a proceder a modificar la programación para adaptarla a la configuración clásica de cola en X.
Deberemos reasignar estos canales, siendo a partir de ahora CH1 nuestra Profundidad y CH2 la nueva Dirección.
Para ello, daremos salida directa de nuestra profundidad ‘virtual’ CH10, al canal ‘real’ del timón de profundidad CH1; y de nuestra dirección ‘virtual’ CH11, al canal ‘real’ del timón de dirección CH2.
Vamos primero con la profundidad:
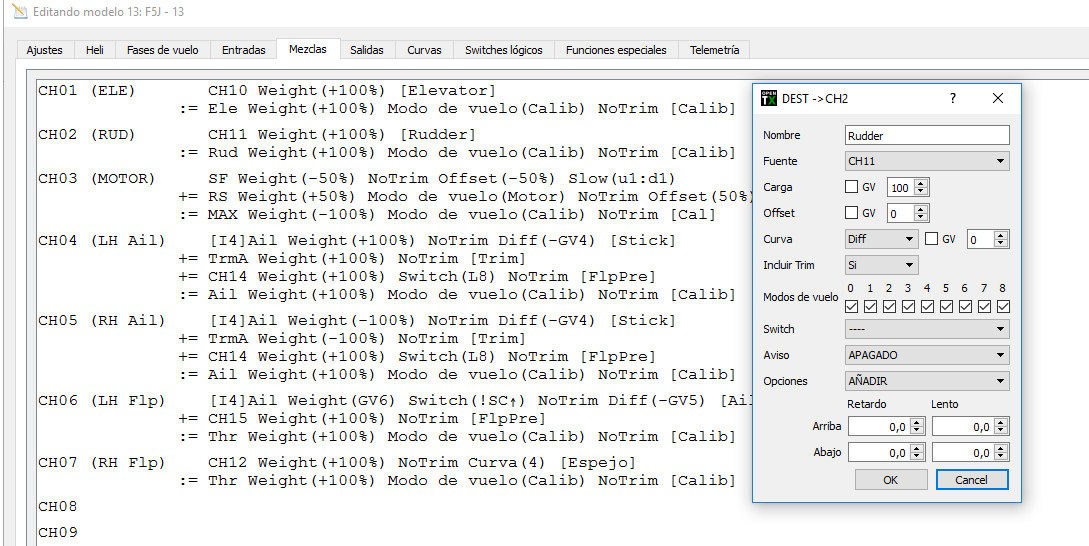
Debemos borrar la mezcla existente con el canal CH11 (rudder), y modificar la mezcla del canal CH10 (profundidad) para darle Peso 100%. Dejamos intacta la línea de mezcla para el modo de Calibración.
| CH1 (ELE) | CH10 Weight (+100%) [Elevator] |
| := Ele Weight (+100%) Modo de vuelo (Calib) Notrim [Calib] |
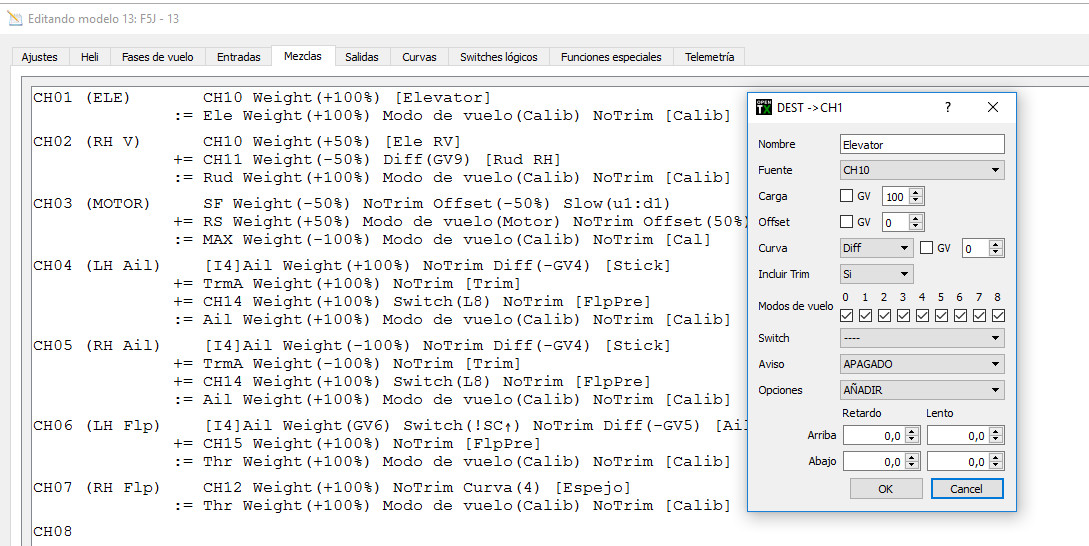 |
Ahora lo propio con la dirección:
Borraremos la mezcla existente con el canal CH10 (profundidad), y modificaremos la mezcla del canal CH11 (rudder) para darle Peso 100%. Dejamos intacta la línea de mezcla para el modo de Calibración.
| CH2 (RUD) | CH11 Weight (+100%) [Rudder] |
| := Rud Weight (+100%) Modo de vuelo (Calib) Notrim [Calib] |
 |
Ya veis que nuestra tarea era sumamente fácil.
Pero…..queda por ajustar un detalle más. Si recordáis, habíamos dedicado la variable global 9 al diferencial de cola.
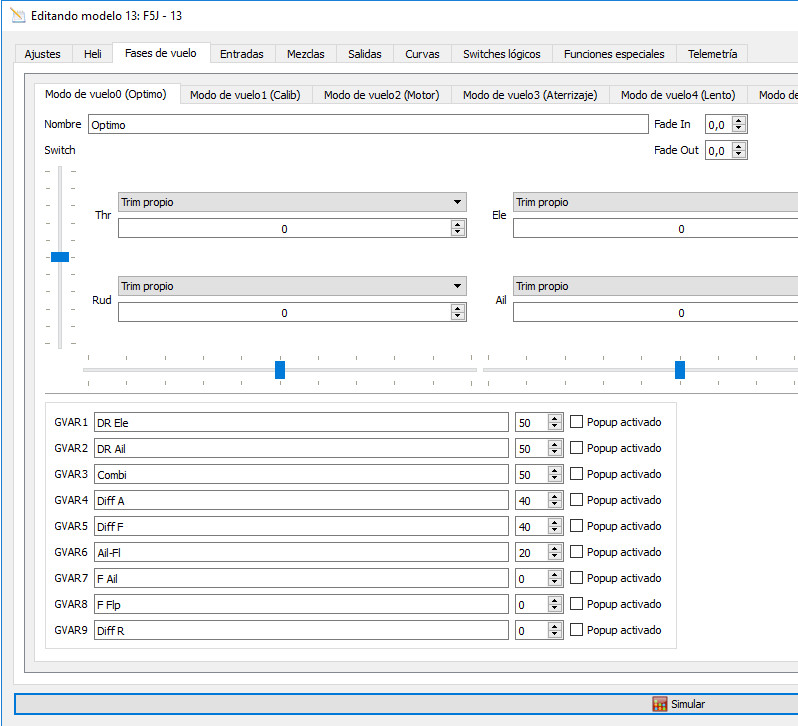 |
Obviamente, este parámetro no tiene ahora ningún sentido, por lo que podemos dar un nuevo uso a esta variable. ¿Qué tal….. Dual Rate de dirección?
Renombramos la variable global 9 como DR Rud y le damos valores en los diferentes modos de vuelo según vuestro criterio:
|
|
Óptimo | Calibr | Motor | Aterrizaje | Lento | Rápido | |
| GVAR 1 | DR Ele | 50 | 100 | 70 | 100 | 70 | 50 |
| GVAR 2 | DR Ail | 50 | 100 | 70 | 100 | 70 | 50 |
| GVAR 3 | Combi | 50 | 0 | 50 | 0 | 50 | 50 |
| GVAR 4 | Diff A | 40 | 0 | 40 | 0 | 40 | 40 |
| GVAR 5 | Diff F | 40 | 0 | 40 | 0 | 40 | 40 |
| GVAR 6 | Ail-Fl | 20 | 0 | 20 | 20 | 20 | 20 |
| GVAR 7 | F Ail | 0 | 0 | -10 | 0 | 30 | -20 |
| GVAR 8 | F Flp | 0 | 0 | -5 | 20 | 15 | -10 |
| GVAR 9 | DR Rud | 50 | 100 | 70 | 100 | 70 | 50 |
| ¡¡¡ATENCIÓN!!! Es muy importante no dejar los Dual Rates de profundidad, alabeo o dirección (Variables Globales GVAR 1, GVAR 2 y GVAR 9 respectivamente ) con valor cero, ya que nos quedaríamos ¡¡¡¡sin mando!!!! |
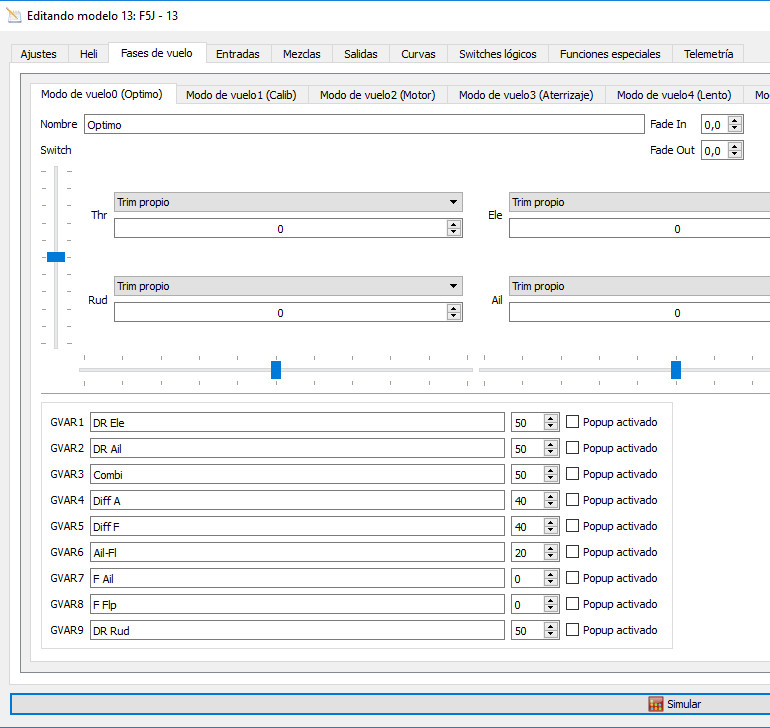
Sólo os ponemos la imagen de un modo de vuelo, pero no olvidéis dar valores a los Dual Rates en todos y cada uno de los modos de vuelo. ¿Os he dicho que ninguna variable global de Dual Rates puede quedar con valor 0?
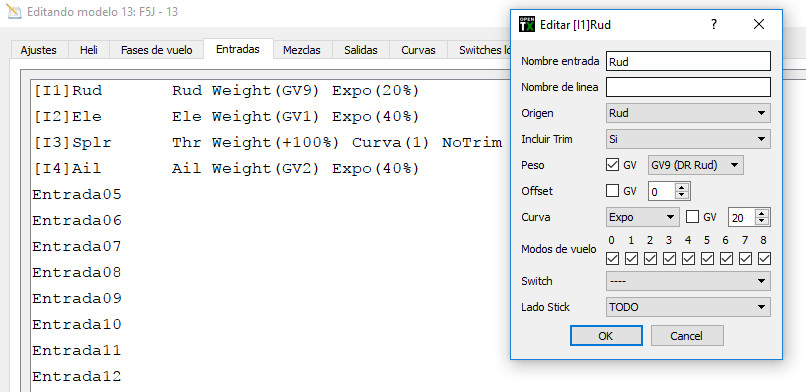
Ya sólo queda aplicar el nuevo Dual Rate en la dirección. Es decir, en la página de Entradas, haremos que la variable que controla la dirección sea GV9. Editaremos [I1]Rud para seleccionar como Peso la variable GV9 (DR Rud), como se ve en la siguiente imagen.
Estamos llegando ya el final de la programación de un planeador F5J en nuestra Taranis.
Tenemos pendiente de hablar de la Telemetría, un aspecto que enriquece enormemente nuestra emisora. Pero antes de seguir avanzando, quisiera detenerme un instante en otra de las facetas que hacen sobresaliente esta radio……..
¡¡¡LAS VOCES!!!
En mi humilde opinión, las voces en Taranis son fundamentales. No por su efecto estético, que es espectacular, sino por lo que supone en seguridad. Con tanto botón, tanta función y tanta leche…..las voces de la emisora nos permiten confirmar la acción realizada sobre interruptores y potenciómetros de la emisora sin tener que apartar los ojos de nuestro avión en vuelo.
Existe la posibilidad de que esta confirmación venga a través de pitidos o sonidos característicos que serán entendidos, o no, por el piloto. Pero las voces son un paso más hacia la excelencia ya que el mensaje es transmitido sin ambigüedades. Incluso siendo un piloto no habitual, el mensaje «Flaps Abajo» será entendido por cualquiera, así que estos anuncios en voz, resultan una herramienta muy efectiva para aumentar esto que llaman Conciencia Situacional.
Existen muchas librerías con los mensajes más habituales en diferentes idiomas y estilos disponibles en Internet. Además, encontraremos fácilmente tutoriales que nos enseñan a crear nuestros propios anuncios a nuestra medida. Así que no nos centraremos tanto en la creación, sino en la programación de estas voces.
Ya volviendo a nuestro modelo, estos son los mensajes que podríamos considerar imprescindibles para volar sin tener que mirar los botones de la emisora:
| FUNCIÓN | ACTIVADOR | MENSAJE | FICHERO |
| Modo Rápido | SB↑ | Flaps negativos | MRap.waw |
| Modo Óptimo | SB- | Máximo Planeo | MOpt.waw |
| Modo Lento | SB↓ | Flaps Positivos | MLnt.waw |
| Modo Aterrizaje | L6 | Aterrizaje | MAte.waw |
| Mandos Independientes | SC↑ | Mandos Separados | Indep.waw |
| Mandos Dependientes | SC- | Flaperones | Depen.waw |
| Mandos dependientes + Snap Flaps | SC↓ | Snap Flaps | SnapF.waw |
| Compensador Más | SA↑ | Alante | VelMax.waw |
| Compensador Menos | SA↓ | Atrás | VelMin.waw |
En nuestro caso, hemos decidido crear nuestros propios mensajes a través de la página web Acapela (http://www.acapela-group.com), tratando los archivos mp3 obtenidos con el programa gratuito Audacity (http://www.audacityteam.org) y hemos guardado éstos en formato waw en la carpeta SOUNDS de la tarjeta SD de la emisora con los nombres de archivo que veis en la última columna.
En la tabla anterior ya hemos dejado todo preparado, puesto que aparece el interruptor que hace cierta y activa la función y el nombre del archivo a reproducir.
Para implementar la programación de los diferentes avisos en OpenTx, entraremos en la lengüeta de Funciones Especiales para utilizar «Reproducir Pista» en cada uno de estos avisos.
| # | Cambiar | Acción | Parámetros | Activar | |
| SF11 | SB↑ | Reproducir Pista | MRap | ► | No Repetir |
| SF12 | SB- | Reproducir Pista | MOpt | ► | No Repetir |
| SF13 | SB↓ | Reproducir Pista | MLnt | ► | No Repetir |
| SF14 | L6 | Reproducir Pista | MAte | ► | No Repetir |
| SF16 | SC↑ | Reproducir Pista | Indep | ► | No Repetir |
| SF17 | SC- | Reproducir Pista | Depen | ► | No Repetir |
| SF18 | SC↓ | Reproducir Pista | SnapF | ► | No Repetir |
| SF20 | SA↑ | Reproducir Pista | VelMax | ► | No Repetir |
| SF21 | SA↓ | Reproducir Pista | VelMin | ► | No Repetir |
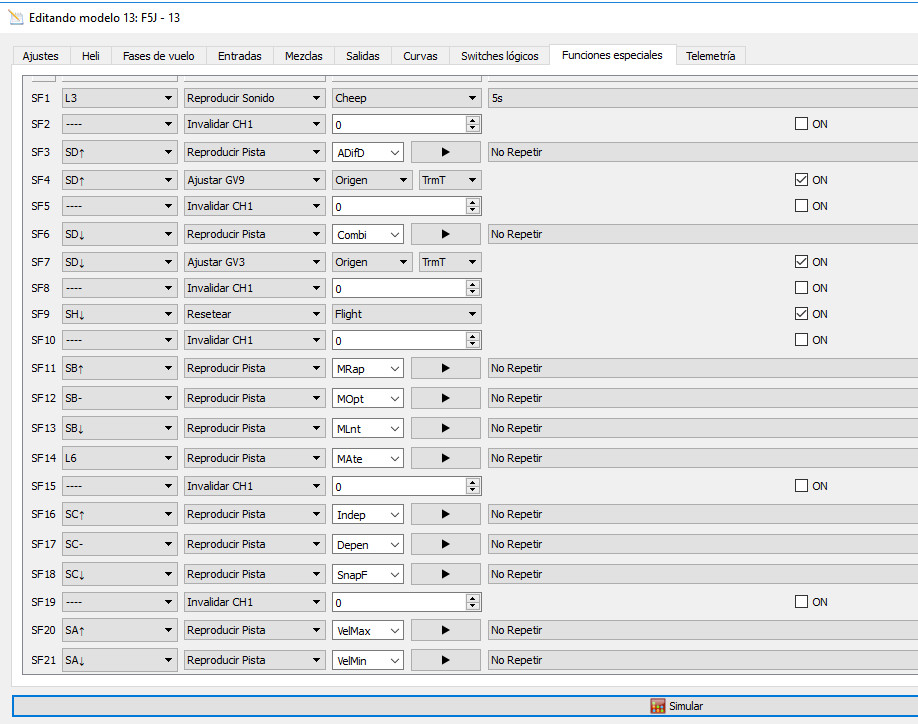
Seleccionamos la opción «No Repetir» para escuchar el mensaje sólo una vez al activar la función correspondiente.
Resulta de mucha utilidad controlar el volumen con el que saldrán los sonidos en la emisora, asignando el control del mismo a un potenciómetro, digamos…. ¿F2?
Por supuesto, es a gusto del piloto, pudiendo emplearse cualquier otro control de la emisora.
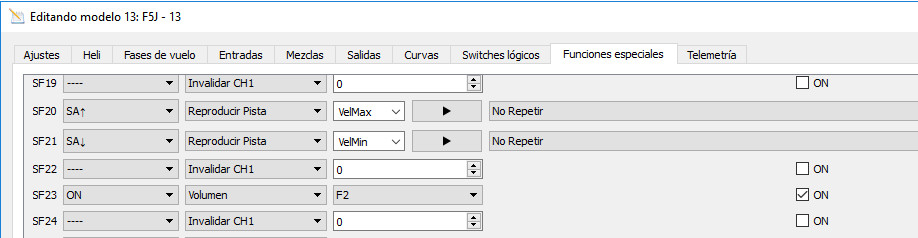
Como podéis imaginar, existe la función especial «VOLUMEN», así que no tenemos más que llamarla de la siguiente manera:
|
# |
Cambiar | Acción | Parámetros | Activar |
|
SF23 |
ON | VOLUMEN | F2 |
ON |
Si vamos a la página de Funciones Especiales, en el campo Cambiar, de la función SF23, seleccionaremos ON, para que no dependa de la posición de ningún interruptor, controlada por el potenciómetro F2 y la activaremos seleccionando nuevamente ON.
Veréis que merece la pena dedicar un poco de tiempo a este tipo de detalles. En vuelo, tendremos muchas menos posibilidades de cometer errores en el manejo de la emisora…..Mano de Santo.
Tienes disponible esta entrada en fichero pdf 22. Cola convencional.
Un saludo, Tiziano.
P.D.: Recuerda que puedes hacer tus comentarios o preguntas en el hilo del foro http://www.miliamperios.com/foro/post1356615.html#p1356615