
- Vie, 07 Abr 2017 9:25
#1368409
Yo ahora me estoy pegando con el minimOSD.. tras muchas vueltas logre flashearlo con el de rcgroups este: https://www.rcgroups.com/forums/showthr ... imOSD-fork
y subirle los caracteres (con la movida esa de primero flashear un firm que es solo para subir caracteres y una vez subidos flashear firm)
la cosa es que ahora tras arrancar el minim sale la pantalla inicial 1 segundo y pasa a la de "NO INPUT DATA" inmediatamente..
He revisado el cable que habia pillado para el minim.. es de esos que vienen con 2 salidas..una para OSD y otra para la radio.. y creo que esta mal.. pues en el enchufe para OSD solo le llega masa , voltaje y el que corresponde al pinRX del APM al pin RX del minim... creo que tiene que ser del TX de APM al RX del minim no?
El cable cerdo que pille es .. por parte del APM:
DF13
-rojo (+5V)
-amarillo (TX segun esquema)
-verde (RX segun esquema)
-vacio
-negro (GND)
Luego los dos conectores que le salen son
OSD:
-vacio
-Negro GND
-rojo (+5V)
-Verde (segun el esquema anterior seria el RX del APM)
-vacio
.vacio
RADIO:
-Negro (GND)
-vacio
-rojo (+5V)
-Amarillo (TX del APM segun esquema)
-Verde (RX del APM)
-Vacio
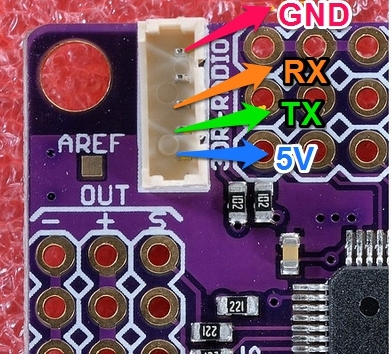
Tal como veo el esquema del MinimOSD es
-GND
-GND
-+5V
-RX
-TX
-DTE/RESET
Si no estoy entiendo mal el conector que tengo por el lado del OSD esta mal ya que mete el RX del APM al RX del minim.. de modo que por ahi no entraria nada.. sin embargo el de radio si parece estar bien pues estan cruzados los de RX con TX correctamente (creo que no es necesario conectar el RX de APM al TX del OSD pero no deberia hacer nada malo si esta no?) ..la cosa es.. la diferente situacion del GND tampoco influye no? porque me dio por probar con el de radio una vez y tampoco funciono.. puedo cambiar facilmente el GND de un pin a otro pero en teoria son las dos iguales no?
Hay algo que deba revisar en APM? vi un video donde decian que tenias que asginar un canal con un valor para que APM funcione... eso es asi o es solo para cambiar pantalla?
y subirle los caracteres (con la movida esa de primero flashear un firm que es solo para subir caracteres y una vez subidos flashear firm)
la cosa es que ahora tras arrancar el minim sale la pantalla inicial 1 segundo y pasa a la de "NO INPUT DATA" inmediatamente..
He revisado el cable que habia pillado para el minim.. es de esos que vienen con 2 salidas..una para OSD y otra para la radio.. y creo que esta mal.. pues en el enchufe para OSD solo le llega masa , voltaje y el que corresponde al pinRX del APM al pin RX del minim... creo que tiene que ser del TX de APM al RX del minim no?
El cable cerdo que pille es .. por parte del APM:
DF13
-rojo (+5V)
-amarillo (TX segun esquema)
-verde (RX segun esquema)
-vacio
-negro (GND)
Luego los dos conectores que le salen son
OSD:
-vacio
-Negro GND
-rojo (+5V)
-Verde (segun el esquema anterior seria el RX del APM)
-vacio
.vacio
RADIO:
-Negro (GND)
-vacio
-rojo (+5V)
-Amarillo (TX del APM segun esquema)
-Verde (RX del APM)
-Vacio
Tal como veo el esquema del MinimOSD es
-GND
-GND
-+5V
-RX
-TX
-DTE/RESET
Si no estoy entiendo mal el conector que tengo por el lado del OSD esta mal ya que mete el RX del APM al RX del minim.. de modo que por ahi no entraria nada.. sin embargo el de radio si parece estar bien pues estan cruzados los de RX con TX correctamente (creo que no es necesario conectar el RX de APM al TX del OSD pero no deberia hacer nada malo si esta no?) ..la cosa es.. la diferente situacion del GND tampoco influye no? porque me dio por probar con el de radio una vez y tampoco funciono.. puedo cambiar facilmente el GND de un pin a otro pero en teoria son las dos iguales no?
Hay algo que deba revisar en APM? vi un video donde decian que tenias que asginar un canal con un valor para que APM funcione... eso es asi o es solo para cambiar pantalla?
----------------------------------------
Escuela FPV / HBZ Champion / PKZ T-28D / SIG Ninja / HawkFighter / 3DMon LilRipper
Phoenix 2000 / Elektro Rookie FPV/ CL-415 / ZMR250 FPV / FT MiniGuinea
Escuela FPV / HBZ Champion / PKZ T-28D / SIG Ninja / HawkFighter / 3DMon LilRipper
Phoenix 2000 / Elektro Rookie FPV/ CL-415 / ZMR250 FPV / FT MiniGuinea

