- Mar, 21 Feb 2017 17:56
#1365669
Capitán Pattex, no sé como funcionan los archivos .bin. Lo siento.
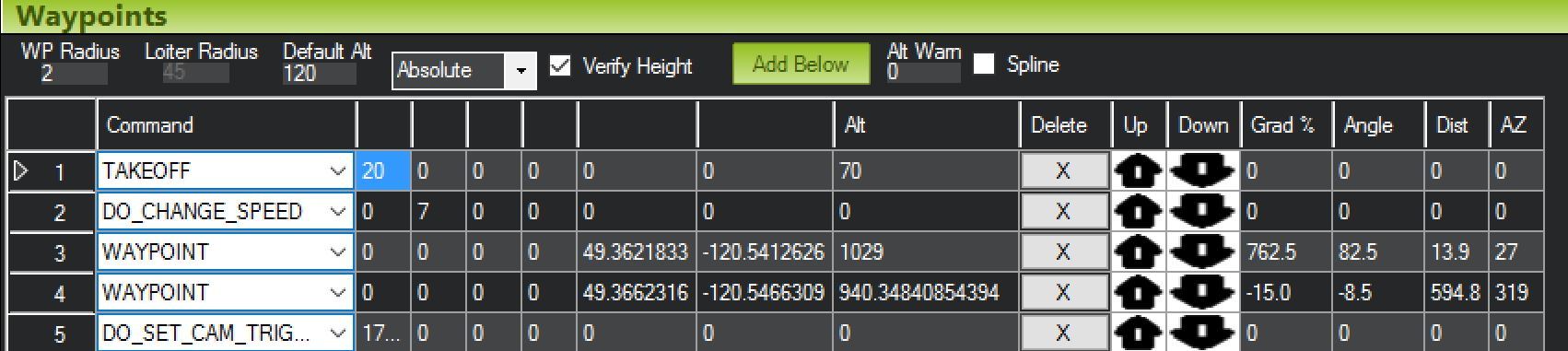
En el despegue en AUTO le programo un WP a una distancia de 50 m. del punto de despegue y una altura de 13 m. con ángulo de 15º.
No he usado el retardo. Mi experiencia es que al activar AUTO arranca el motor y se suelta el modelo. Cuando se han recorrido 3 m. entra en modo despegue y va al primer WP definido como Take off (50 m. h 13 m. alfa 15º). Así me funciona perfecto.
No creo que te hagan falta muchos cálculos, comprobaría si un retardo de 2 seg por ejemplo te bastan para haber desenganchado la catapulta. Tiene que haber una sincronía entre activar la catapulta y pasar a AUTO, sino ....
Espero te ayude.
En el despegue en AUTO le programo un WP a una distancia de 50 m. del punto de despegue y una altura de 13 m. con ángulo de 15º.
No he usado el retardo. Mi experiencia es que al activar AUTO arranca el motor y se suelta el modelo. Cuando se han recorrido 3 m. entra en modo despegue y va al primer WP definido como Take off (50 m. h 13 m. alfa 15º). Así me funciona perfecto.
No creo que te hagan falta muchos cálculos, comprobaría si un retardo de 2 seg por ejemplo te bastan para haber desenganchado la catapulta. Tiene que haber una sincronía entre activar la catapulta y pasar a AUTO, sino ....
Espero te ayude.