
- Lun, 17 Ene 2011 11:27
#1014581
Muy buenas,
Bueno, pues como dice el asunto mi reto es construir y hacer volar un Bicóptero como el que os pongo aquí debajo paso a paso e ir contarlo aquí. Mas o menos por tamaño y apariencia se parecerá a esto

Que yo haya visto en internet solo hay una empresa, canadiense, que comercializa aparatos como este. Se llama Gress Aeronautic
http://www.gressaero.com/
Creo justo nombrarlos por haberme animado viendo vídeos suyos.
Tengo casi la lista de la compra hecha en hobby king y en nada me pondré con la estructura. Nunca he hecho nada construido pro mi mismo para aeromodelismo y cuento con una dremel y poco mas, pero con imaginación yo creo que saldré adelante!!!
La idea de este post no solo es mostrar mis avances para quien se anime o le interese el asunto, sino también que opinéis y deis vuestras ideas en muchas cosas que seguro yo tropiezo.
Para empezar mi primera gran duda ha sido el sistema de estabilización y mezclado. No hay mucha información al respecto por lo que dándole a la cabeza estoy yo diseñando el mio propio.
Básicamente lo primordial es que estos aparatos son incontrolables para ser pilotados "a mano", por lo que se hace imprescindible una estabilización en los 3 ejes mediante 3 giroscopos. Seguramente el uso de altímetros, acelerómetros y demás, como se hace en muchos "quadricopteros", ayudaría, pero yo creo que si un tricoptero vuela estable sin ellos éste también lo hará!
Una vez se ha estabilizado el mando en alabeo, cabeceo y guiñada mediante 3 gyros puestos ortogonalmente es necesario realizar varias mezclas de canales para administrar los dos servos y dos motores con los que contará el aeromodelo. En la siguiente imagén se muestra un resumen
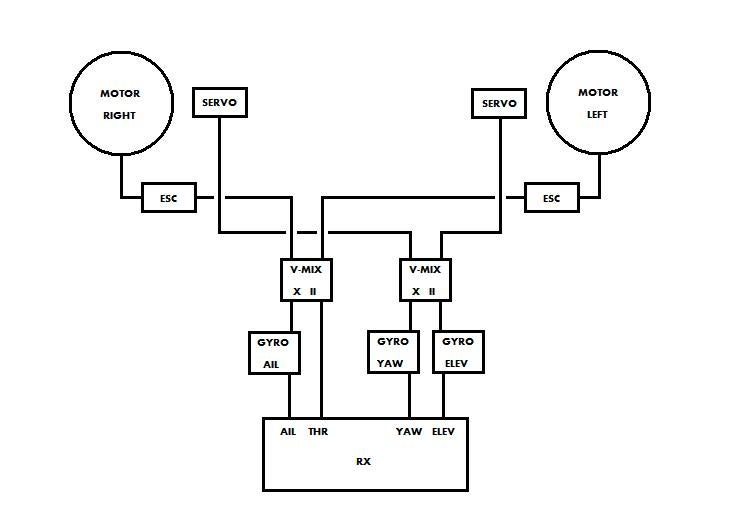
Para esta mezcla me veía sin otra salida que el uso de electrónica programable tipo arduino de la que, aunque estoy documentandome. estoy muy pez. Seguramente acabaré haciendo uso de ella pero el otro día con la almohada tuve una idea feliz: ¿Por que no usar unos mezcladores de "colas en V", "flaperone"s o "elevones" como se usa en muchos aviones que no disponenen de una emisora con dichas configuraciones??? Yo creo que daría resultado dado que como se ve en la imagen básicamente hay que "sumar/restar" las señales de gas y alabeo (después del gyro, claro), saliendo a los ESCs de los dos motores, y las de cabeceo y guiñada (después del gyro también) con salida a los dos servos que actúan sobre la inclinación de cada motor.
Me gustaría que me dijeseis los que entiendan lo que pretendo hacer, si lo veis viable o no, nunca he usado este tipo de mezclador y no sé que problemas puedo encontrarme. Algo he leído sobre que a veces los gyros meten un pequeño retraso en la señal que hacen que no funcionen al estar solapada con la otra que llega sin gyro, por ejemplo. En cualquier caso he visto estos que cuestan cuatro duros y que algun comentario dice que funcionan con gyros, aunque me temo que el mayor problema será la velocidad de reacción, que la necesitaré muy alta y puede que estos aparatos me la limiten. Pero por su precio los probaré!!!
http://www.hobbycity.com/hobbycity/stor ... oduct=6321
Los hay mas caros y seguramente mejores, pero se comentan problemas con gyros....
Bueno, no quiero asustaros mas. Por ahora es suficiente...
Espero vuestras opiniones, no os cortéis!!
Bueno, pues como dice el asunto mi reto es construir y hacer volar un Bicóptero como el que os pongo aquí debajo paso a paso e ir contarlo aquí. Mas o menos por tamaño y apariencia se parecerá a esto
Que yo haya visto en internet solo hay una empresa, canadiense, que comercializa aparatos como este. Se llama Gress Aeronautic
http://www.gressaero.com/
Creo justo nombrarlos por haberme animado viendo vídeos suyos.
Tengo casi la lista de la compra hecha en hobby king y en nada me pondré con la estructura. Nunca he hecho nada construido pro mi mismo para aeromodelismo y cuento con una dremel y poco mas, pero con imaginación yo creo que saldré adelante!!!
La idea de este post no solo es mostrar mis avances para quien se anime o le interese el asunto, sino también que opinéis y deis vuestras ideas en muchas cosas que seguro yo tropiezo.
Para empezar mi primera gran duda ha sido el sistema de estabilización y mezclado. No hay mucha información al respecto por lo que dándole a la cabeza estoy yo diseñando el mio propio.
Básicamente lo primordial es que estos aparatos son incontrolables para ser pilotados "a mano", por lo que se hace imprescindible una estabilización en los 3 ejes mediante 3 giroscopos. Seguramente el uso de altímetros, acelerómetros y demás, como se hace en muchos "quadricopteros", ayudaría, pero yo creo que si un tricoptero vuela estable sin ellos éste también lo hará!
Una vez se ha estabilizado el mando en alabeo, cabeceo y guiñada mediante 3 gyros puestos ortogonalmente es necesario realizar varias mezclas de canales para administrar los dos servos y dos motores con los que contará el aeromodelo. En la siguiente imagén se muestra un resumen
Para esta mezcla me veía sin otra salida que el uso de electrónica programable tipo arduino de la que, aunque estoy documentandome. estoy muy pez. Seguramente acabaré haciendo uso de ella pero el otro día con la almohada tuve una idea feliz: ¿Por que no usar unos mezcladores de "colas en V", "flaperone"s o "elevones" como se usa en muchos aviones que no disponenen de una emisora con dichas configuraciones??? Yo creo que daría resultado dado que como se ve en la imagen básicamente hay que "sumar/restar" las señales de gas y alabeo (después del gyro, claro), saliendo a los ESCs de los dos motores, y las de cabeceo y guiñada (después del gyro también) con salida a los dos servos que actúan sobre la inclinación de cada motor.
Me gustaría que me dijeseis los que entiendan lo que pretendo hacer, si lo veis viable o no, nunca he usado este tipo de mezclador y no sé que problemas puedo encontrarme. Algo he leído sobre que a veces los gyros meten un pequeño retraso en la señal que hacen que no funcionen al estar solapada con la otra que llega sin gyro, por ejemplo. En cualquier caso he visto estos que cuestan cuatro duros y que algun comentario dice que funcionan con gyros, aunque me temo que el mayor problema será la velocidad de reacción, que la necesitaré muy alta y puede que estos aparatos me la limiten. Pero por su precio los probaré!!!
http://www.hobbycity.com/hobbycity/stor ... oduct=6321
Los hay mas caros y seguramente mejores, pero se comentan problemas con gyros....
Bueno, no quiero asustaros mas. Por ahora es suficiente...
Espero vuestras opiniones, no os cortéis!!
Jose Miguel
* Minimag con motor brushless
* P-51 de art-tech version brushless
+CopterX 450AE
-Futaba 4EXA
-Futaba T6EX 2.4GHz
* Minimag con motor brushless
* P-51 de art-tech version brushless
+CopterX 450AE
-Futaba 4EXA
-Futaba T6EX 2.4GHz







