- Vie, 25 Ago 2006 17:10
#288489
Hola.
Igual que hay en otros subforos post sobre como empezar en una determinada disciplina he considerado necesario tener una explicacion sobre este tipo de motorizacion, como funcionan y como acertar en la eleccion del conjunto para un determinado avion.
Animo a todo el que tenga algo de experiencia a completar/resolver/corregir/preguntar o lo que sea necesario para obterner una informacion lo mas acertada posible sobre esta motorizacion.
UN POCO DE HISTORIA:
Durante la segunda guerra mundial, la hélice con motor de combustion interno había llegado a sus limites, el limite principal es que la punta de la pala alcanzaba velocidades superiores a la del sonido, y eso tiene muchos problemas, se partian, existencia de resistencias parasitas muy fuertes y probablemente otras mas. La solucion fue reducir el diametro de la pala, aumentar el numero de palas (para compensar la falta de diametro) y entubarlas para evitar las turbulencias de las puntas de las hélices para así aumentar el rendimiento.
Esto duró muy poco, pues los motores no eran capaces de dar muchas rpms, ademas ya existian otras motorizaciones a priori mucho mas impresionantes como los pulso reactores o las turbinas, lo que desbancaron rapidamente a los Ducted Fans.
Un EDF (electric ducted fan) en RC no es mas que algo estético para poder hacer determinados modelos a escala, ya que en RC nuestras palas no llegan a la velocidad del sonido. En realidad es la motorizacion mas "mala" y cara para RC electrico.
Pros y contras de usar esta motorizacion:
Pros:
- Estetica.
- Sonido (es bonito el silbido).
- Posibilidad de volar jets a "bajo" precio.
- Aviones a escala.
- Velocidad alta. (lo que no significa que no se consiga lo mismo con hélice).
- El torque del conjunto motor es muy bajo.
Contras:
- Es la motorizacion electrica mas cara.
- El tiempo de vuelo es muy reducido.
- Aconsejable hierba para arrastrar la panza al aterrizar si no dispone de tren de aterrizaje.
- Nivel de pilotaje medio/alto.
- El modelo tambien suele ser algo mas caro.
SOBRE NUESTROS EDFs.
El principio de empuje del edf es el mismo que el de una helice, pero interviene ademas la presion entre camaras. Los elementos principales de nuestros edfs son (de delante a atras):
Intake ring: o anillo de entrada, mejora la entrada del aire en el tubo, facilitando la absorcion del aire y evitando turbulencias, no es mas que un semicirculo alrededor de la boca de entrada y que mejora el empuje estatico alrededor de un 25%!!!, El dinamico (volando en el aire) no le importa demasiado pues la misma velocidad del aparato en el aire le facilita el aire.
Este elemento no es necesario cuando el avion vuela a cierta velocidad por lo que se puede prescindir de el, ademas suele ser de quita y pon.
Tubo: el tubo no tiene porque ser igual en toda su longitud, por la parte de toma de aire (camara anterior) puede incluso ser un poco mas pequeño ya que el aire efectivo que cojeria es el diametro total menos el del cono del rotor, es decir, podriamos reducirlo como mucho, lo que el cono, algunos fabricantes hasta recomiendan siempre reducirlo un poquito si el tubo de entrada es largo ya que solventa unos problemas de turbulencias a la entrada aunque esto pocas veces lo he visto aplicado.
Por la parte del rotor siempre debe ser fijo y mientras mas ajustado al rotor mas rendimiento se obtiene al ser ambas camaras mas "estancas".
La parte de la salida puede o no estrecharse alrededor de un 10% del diametro interior del tubo y con no mas de 10º de angulo de reduccion, esto sirve para aumentar la velocidad del aire a la salida y la presion de la camara posterior ganando asi un poco de velocidad al avion, si no se pone se tiene mas superficie de empuje por lo que tardaria menos en cojer la velocidad maxima, que sera inferior que si estrechamos la salida.
Rotor: es obio decir que es la parte que gira y la mas importante en mi opinion, el materiral con el que esta construido es de suma importancia ya que cualquier deformacion debido a las fuerzas que esta sometido es una gran perdida de rendimiento, generalmente para motores de escobillas comunes suelen estar hechos de plastico, y para motores brushless potentes en fibra, nylon o carbono, si pusieramos un motor potente en uno de plastico suelen deformarse los alabes (pala de un rotor) expendiendose y rozando con el tubo ademas de deformarse hacia adelante, esto ultimo tambien le pasa a las helices convencionales.
El numero de alabes y paso del alabe suele esta calculado para una gama de rpms utiles, menos alabes suele ser para mas rpm, los shuebeler DS51 3ph solo tienen 3, esto es de lo mejorcito que hay en EDF en el mercado.
Suelen ponerle mas paso de alabe (pala) a motores de escobillas para compensar un poco la falta de rpms. Por lo que a priori si colocaramos un motor brushless (mas potencia y rpms) tiraria mucho, solo que el motor suele ir forzado y consumira mucho sin llegar a sus rpms optimas.
Estators: esta parte tiene 2 funciones, una aerodinamica y la otra de sujeccion del motor dentro del tubo.
Cuando al aire sale del rotor, éste sale girando, y esto es una perdida de potencia ya que nos entró sin girar, los estators tiene una forma casi como la de un alabe pero en sentido contrario, su funcion es hacer que el flujo de aire sea recto y no giratorio ganando rendimiento. El paso del estator es aproximadamente el mismo que el del alabe pero terminando una parte recta. El numero de estators optimos suele ser aproximadamente igual que el de alabes del rotor, generalmente tiene uno menos, pero depende del fabricante, pues mientras mas, mas caro será.
Cono de salida: es una pieza conica que se coloca detras del motor, su funcion es reducir las turbulencias que crea la parte trasera del motor optimizando el flujo del aire y por tanto el rendimiento, no todos los edfs comerciales lo traen, pero si en todos es necesario, si no viene deberiamos hacer un cono con cartulina, acetato o similar, yo los suelo agarrar al motor con celo, la longitud se suele poner un poco superior a la del motor.
 Visto 27176 veces") Foto 1
Foto 1
CALCULOS
Ahora viene lo que mas interesa, que es colocar el EDF adecuado para nuestro modelo.
Generalmente lo que necesitamos en estas motorizaciones es obtener todo el empuje que podamos, pues suele ser velocidad lo que queremos, partimos tambien de que casi todos queremos volar aviones como un F16, F22, F5, airbus y por el estilo, es decir, aviones con una carga alar relativamente grande.
Se dice que la relacion peso/potencia para estos aviones es de entre 0.6 y 0.8 es decir si el avion pesa 1k pondriamos entre 600 y 800g de empuje estatico, esta claro que si tenemos mas, pues mejor, aunque este es uno de los parametros de la EDF, otro importante pero que nunca tenemos en cuenta es el flujo del aire que en el caso de la wemotec 480 (68mm) es de 26,2 qcm aunque tampoco es un parametro que se suela tener en cuenta, ademas de que pocos fabricantes lo dan.
Algunos fabricantes nos dan el rango de empujes de sus EDF en Newtons, ej, de 2 a 14N (wemotec 480) de empuje estatico, pasa nada, 10newtons = 1k aproximadamente, en el ejemplo 1.4k, esto siempre suelen darlo con el intake ring puesto.
Perdonad que os insista en este fan, pero es de los que hay mas datos ademas de estar mas que probada su eficacia, y tiene buena relacion calidad/precio/prestaciones.
Para obtener el empuje dada una EDF solo se necesitan rpms, hay una relacion entre empuje y rpms exponencial, un amuento pequeño en las rpm es un gran auemtno en el empuje,es decir, paracticamente de la mitad del stick en adelante es cuando el empuje de la edf es notorio y con un pequeño cambio en las rpm hay una gran variacion de empuje, podeis obserbar la grafica de la wemotec 480.
 Visto 26797 veces") Foto 2
Claro que muy pocos fabricantes ofrecen estos datos, por no decir que solo he visto estas graficas con las wemotec, por lo que solo nos queda dos opciones, o fiarnos de los fabricantes en cuanto al motor a usar, ej, usar plettember 200/20/4 con X elementos o bajarnos un programa de claculo que aunque no real, siempre es de gran utilidad para no cagarla en grande. Estos programas te dan las rpm, empuje estatico aproximado, consumo, perdidas por caida de tensio esc, tiempo efectivo de vuelo etc.
Foto 2
Claro que muy pocos fabricantes ofrecen estos datos, por no decir que solo he visto estas graficas con las wemotec, por lo que solo nos queda dos opciones, o fiarnos de los fabricantes en cuanto al motor a usar, ej, usar plettember 200/20/4 con X elementos o bajarnos un programa de claculo que aunque no real, siempre es de gran utilidad para no cagarla en grande. Estos programas te dan las rpm, empuje estatico aproximado, consumo, perdidas por caida de tensio esc, tiempo efectivo de vuelo etc.
Partamos de que sabemos que EDF necesita nuestro avion, pues seguramente nos lo diga el fabricante, y tambien tenemos el peso y por lo tanto el empuje que necesitamos, ¿que motor y baterias pondremos en los programas de calculo?
Si sabemos que EDF tambien sabemos el tamaño del motor, para 55mm motores tamaño 280 o 300, para 70mm tamaño 400 o 480, para 90mm tamaño 600. como norma general. Si sabemos el tamaño tambien sabemos los amperios aproximados maximos que pueden aguantar, un 280 alrededor de 15A, un 400 alredeor de 30A, esto lo determina tambien las rpm/v del motor pero partamos de una base.
Se dice que P = V x I, potencia = tension (voltios) por intensidad (amperios), a nosotros nos interesa que el motor consuma lo menos posible (amperios) y que tenga la mayor potencia posible, asi que solo nos queda un parametro para aumentar, que es la tension, es decir, el numero de elementos.
El numero de elementos maximos suele decirlo el fabricante del motor, que suele andar por los 10 elemenos niMH o 3lipos, en algunos casos 12 elementos y en casos como motores lehner hasta 20 elementos. Asi que nosotros usaremos el numero de elementos maximos que no dice el fabricante.
Despues de tener en el programa de calculo el numero de elementos, pondremos una bateria de gran capacidad (despues arreglamos eso).
Tenemos ahora que elejir solo el motor, partiremos entonces de motores que den 3000rpm/v del tamaño adecuado para nuestro fan y pulsaremos el boton de ver los resultados, si los amperios de consumo que aparece es inferior a los que dice el fabricante pondremos un motor con mas rpm/v del mismo tamaño, si es al contario, bajaremos las rpm/v.
Cuando los amperios sean igual o ligeramente superior estamos sacando el maximo partido al motor. Esto se traduce tambien en el mayor empuje que se pueda obtener con ese motor, si este empuje no fuera suficiente para nuestro modelo tendriamos que colocar motores que soporten un mayor numero de elementos.
Tenemos ahora un consumo concreto, ej 30A, podemos ahora ajustar la bateria, la intensidad maxima que nos debe dar las baterias debe ser un 25% mas de lo que realmente vamos a consumir, y la bateria mas pequeña (por peso y tamaño) que nos daria ese consumo podria ser 1800mA 20C 3S1P, esa es, como minimo la bateria que deberiamos poner.
Si recalculamos ahora, tendriamos el tiempo maximo de vuelo con el motor al 100%, que por lo que suelo ver el minimo ronda los 3 o 4min, es decir, que ademas de ser una motorizacion cara, tenemos un tiempo de vuelo muy bajo.
El ESC debe de ser tambien almenos un 25% de amperios mas de lo que vamos a manejar.
YA TENEMOS TODO ELEJIDO.
Existe otra grafica, que es de potecia (watios) / empuje, esta grafica nos hara tener una idea de la potencia que vamos a manejar, y por tanto consumo que debemos hacerle al motor con cualquier numero de elementos, siempre que mantengamos la potencia.
Por desgracia solo las he visto con wemotec, podeis verlas aqui:
Son todas las graficas de fans wemotec.
http://www.awatson1.fsnet.co.uk/fandata.htm
 Visto 26725 veces") Foto 3
Ejemplo de uso de esta grafica. Tenemos un modelo que pesa 1.2k, y una mini fan 480, un empuje valido podria ser 1k (10N) segun la grafica la potencia necesaria serian 480W, si nuestro motor va a usar 3lipos (11.1v) tenemos que I = W / V, 480W/11.1v = 43A, (un pasote de consumo) tendremos entonces que buscar un motor en el programa de calculo que nos de ese consumo cuando pulsemos calcular, si en vez de 3lipos usaramos 4 (14.8v) el consumo seria de 32A (mejor mas voltios ¿verdad?)
Foto 3
Ejemplo de uso de esta grafica. Tenemos un modelo que pesa 1.2k, y una mini fan 480, un empuje valido podria ser 1k (10N) segun la grafica la potencia necesaria serian 480W, si nuestro motor va a usar 3lipos (11.1v) tenemos que I = W / V, 480W/11.1v = 43A, (un pasote de consumo) tendremos entonces que buscar un motor en el programa de calculo que nos de ese consumo cuando pulsemos calcular, si en vez de 3lipos usaramos 4 (14.8v) el consumo seria de 32A (mejor mas voltios ¿verdad?)
Llegados a este punto, podriamos darnos cuenta que, a medida que aumentamos el numero de elementos, necesitaremos menos rpm/v en el motor, no porque no las queramos, sino porque para ese numero de elementos quemariamos el motor.
EJEMPLOS DE LA VIDA MISMA
El avion electrico con EDF mas rapido que he visto es el Vector II (ver foto), el tal shubeler (el mismo que fabrica los EDF) usó este avion con 20 elementos y uno de sus EDF el DS 51 para ponerlo a la nada despreciable velocidad de 295km/h!!!!, te cagas!!!!, otros aviones como el Blade 2 los he cronometrado a 220km/h que tampoco esta nada mal, solo que los tiempos de vuelo a esas velocidades dudo que llegen a 2min.
 Visto 26713 veces") Foto 4
Foto 4
 Visto 26668 veces") Foto 5
Foto 5
CATAPULTAS
Hay jets que llevan tren de aterrizaje, pero suelen ser los menos, suelen ser retractiles para que el avion sea mas limpo aerodinamicamente y mas bonitos esteticamente (mas caros) y ademas requiere el maximo de potencia para despegar (reduccion notable del tiempo de vuelo). Lo mas habitual es que sean modelos lanzados o a mano o con catapulta, los lanzados a mano suelen ser modelos poco pesados y la tecnica de lanzamiento es la misma que para otro modelo que no sea de EDF, (lanzamiento en linea recta).
He visto varios sistemas de catapultas, no son difíciles de hacer.
Roi import tiene en su web, personalmente me gustan las dos barras laterales y el pedal.
Pero lo que realmente es un problema es la goma pues aunque pudiera ser facil encontrarla no estariamos seguros de si sirve o no para nuestro modelo a no ser que algien ya la haya probado, se dice que las de latex son las mejores, el compañero "largoveleros" las ha probado y ya tenemos una referencia sobre las caracteristicas de la goma y que puede lanzar con ella, mas abajo hay un post.
En el mercado del RC solo he encontrado gomas de multiplex que ademas, estan principalmente pensadas para veleros, no porque no nos sirvan, si no porque los datos que nos dan de esas gomas son de veleros (envergadura y peso).
Si escribis en la web de multiplex www.multiplex-rc.de (puesta en español) "catapulta" os saldran 4 tipos de gomas segun el tamaño y peso del velero, yo compre la que es para veleros de 2k y la puse doble (no encontre la de 4k) y lanzo mi modelo aceptablemente por lo que puedo deducir que el peso de nuestro jet deberia ser almenos la mitad de los kilos que dice en la web, la goma de multiplex se suele estirar un 180%.
Ademas estas gomas estan protegidas con hilo, las de latex no lo estan.
He buscado un poco mas, y en la web de wemotec tienen gomas quirurgicas, no dicen los metros que son, pero si para el peso del avion que es, parece otra buena opcion.
En las catapultas para jets, la longitud de la goma la usan o de 15m o de 7.5m, yo, por seguridad use la de 15m (estaria tirando mas tiempo) y va bien, aunque supongo que igualmente bien podria ir la de 7.5m ademas de necesitar menos espacio.
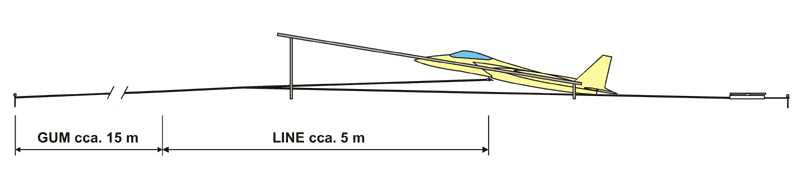 Foto 6
Foto 6
catapulta.jpg (7.38 KiB) Visto 29602 veces
Otro punto importante es donde va el gancho debajo del avion, se suele situar en un punto intermedio entre el morro y el CG, no vale ni en el morro ni en el CG, yo personalmente lo pongo a mediados o un poco mas hacia el morro.
Al soltar el aparato es recomendable salir con la profundidad un poco tirandole hacia atras, y una vez que salga el aparato obserbar la tendencia y corregir.
Hay gente que dice que no se le da motor hasta que no suelte la goma, pero considero que no es del todo acertado, pues acelerar del tirion ademas del elevar el consumo por las nubes instantaneamente creará fuerzas que podrian desestabilizar el aparato si llevan un motor muy potente.
Recomiendo que se saga con el stick al 30% y cuando suelte la goma acelerar al 100% progresivamente pero rapido, no pegar un palancazo, siempre y cuando el despege se aga sin que el avion toque el suelo, pues podria entrar algo por el EDF y dañarlo.
PASANDO DE CURSO (electronica):
Estas cosas enganchan, y pronto nos daremos cuenta que queremos MAAASSS jejejeje
La electronica de un aprato que no sobrepase los 10 elementos generalmente es la clasica y de montaje clasico usando el BEC (battery eliminator circuit) del ESC pero ya con 10 elementos o mas la cosa suele cambiar, no hay BEC, los ESC no tienen BEC ¿¿porque?? pues facil, dentro del ESC con BEC hay una pieza basica 7805 o similar que estabiliza la tension que sea de la bateria a 5v pero claro que tiene un margen de entrada y que ademas mientras mas tension tenga la bateria, menos corriente para nuestros servos y receptor es capaz de entregar asi que se elimina esa pieza y ahora se utiliza bateria auxiliar, como si de un modelo de combustion se tratase.
Esto tiene la desventaja de aumentar el peso del modelo, pero tiene una gran ventaja que es la reduccion del ruido electrico en la alimentacion de nuestra electronica y tambien mas amperios para nuestros servos casi sin limite (lo que nos de la bateria).
Ademas, es recomendable utilizar receptores OPTO (optoacoplados) electricamente tiene el control de la bateria principal y motores aislado reduciendo aun mas el ruido en la alimentacion, (es impresionante lo sucia que es la alimentacion en un ESC con BEC vista con un osciloscopio).
Os dejo un esquema electrico del cableado de un biEDF con 12 elementos como por ejemplo un F22.
 Visto 26990 veces") Foto 7
Cables:
Foto 7
Cables:
No vamos a ponernos con calculos de caida de tension o seccion, pues ya ha pensado la gente en ello y nos dicen los amperios que puede aguantar un cable, las secciones de cables y los amperios que aguantan sin entrar en profundidad, se puede generalizar para nuestro hobby así:
1mm2 -> 15A max
1.5mm2 -> 20A max
2.5mm2 -> 35A max
4mm2 -> 50A max
Otra forma de acertar con el cable es, poner el cable de la misma seccion que tiene el ESC tanto en la entrada como en la salida, claro esta que partiendo de que el ESC que hemos escojido es el adecuado.
Pero el cable de alimentacion tiene mas cosas, resulta que el amperaje quele sacamos a la bateria es pulsatorio, SI, una onda cuadrada, del maximo de amperios que le consume el motor, si miramos una onda cuadrada en un analizador de espectro nos damos cuanta que esta compuesta por muchas frecuencias puras cada vez de menos amplitud a medida que nos alejamos de la portadora, esto quiere decir que pudiera "putearnos" al receptor, sobre todo en motores de escobillas que ademas le salta chispa.
Podemos reducir este efecto notablemente con el simple hecho de trenzar los cables, SI, retorcerlos, esto esta mas que probado que reduce los ruidos, tanto que "salen" del cable como que "entran" a el, (al fin y al cabo el cable de alimentacion tiene una longitud X igual que la antena del receptor), de la misma forma el trenzado en los cables de los servos (motores de escobillas) es tambien aconsejable.
Yo incluso estoy usando cable apantallado de dos hilos mas malla cuando el servo está a cierta distancia del receptor, no es facil encontrarlo y es bastante rigido pero me da seguridad, aunque solo sea psicologica.
A veces, por seguridad, nos interesa usar la bateria auxiliar aunque nuestros ESC tengan BEC, tampoco pesa tanto una bateria 2/3 AAA.
En este caso, lo que debemos hacer es sacar el positivo (rojo) del conector de cada ESC y colocarle termo retractil para que no toque con nada.
Ahora los ESC toman la alimentacion de si mismos y el receptor y servos de la bateria auxiliar.
De esta forma se puede quemar el ESC que el aparato tiene control sobre los mandos, ademas de tener mas seguridad y amperios disponibles para los servos.
CONFIGURACIÓN DE LOS ESC
Partimos que debido a las exigencias de estas motorizaciones la intencion es simepre usar brushless, que ademas cada vez son mas asequibles.
Hay dos parametros de un motor y que no son controlados por el que muchos no saben que poner que son: el timming y la frecuencia.
El timing:
Es donde se produce la conmutacion del bobinado despues de haber sido detectada la nueva posicion del rotor (uff, no vea lo que he puesto), el motor para que gire, tiene que ir cambiando la corriente a cada bobina, y el que cambia esto es el ESC, que ademas es capaz de saber cuando tiene que conmutar a la siguiente y una vez detectado esta el timing, grados de giro a esperar para conmutar a la siguiente, lo que veria es la eficiencia frente a la potencia. Mas eficiencia (rendimiento) menos potencia y viceversa, aunque esto es minimamente no es tan "brusco" como parece, hablamos de un porcentaje bajo pero que siempre esta bien que se pueda optimizar.
Una tabla para mas o menos acertar puede ser esta:
-(2-5 degrees) optimum timing for Hacker Brushless Motors
-(10 degrees) optimum for Aveox or Astro motors and for Maximum RPM on Hacker Brushless Motors
-(18 degrees) optimum timing for Phaser, Mega, Plettenberg and for Maximum RPM on Aveox, Astro motors
-(30 degrees) optimum timing for AXI, Köhler or Actro motors and for Maximum RPM on Phasor, Mega, Plettenberg motors
He visto graficas comparativas de un mismo conjunto con dos configuraciones diferentes de timming y la verdad esque existia muy poca diferencia, es cierto que existia mas potencia con una pero de 20A subia a 21A o una cosa asi, un 5%, esto no determina nada en nuestro modelo EDF aunque yo lo ponia en el máximo.
Frecuencia:
Nuestros motores funcionan por la variacion de la frecuencia trifasica, pero esta frecuencia que nos dan a cambiar no se refiere a eso, sino a la frecuencia de la PWM que se le aplica además a la onda trifasica (complicao no?.
Yo hice algunas pruebas y no encontré diferencia alguna, pero teoricamente, mas frecuenca es para motores que giran mas lento (generalmente mas grandes) y menos para mas pequeños (o muchas rpm).
Podriamos usar esta tabla demasiado generica para mi gusto:
(8 kHz) optimum for Hacker Brushless Motors.
(16 kHz) for Aveox, Astro, Plettenberg, Phaser, Mega motors.
(32 Khz) for Köhler ,Actro
La frecuencia varia el par del motor, menos frecuencia, mas par y claro, mas consumo, se trata pues de llegar a un equilibrio entre el consumo y el par que parece estar en 16Khz, aunque usar 8Khz tambien nos vendria bien, al fin y al cabo, no hacemos mas que chupar una cantidad ingente de amperios con esta motorizacion.
Igual que hay en otros subforos post sobre como empezar en una determinada disciplina he considerado necesario tener una explicacion sobre este tipo de motorizacion, como funcionan y como acertar en la eleccion del conjunto para un determinado avion.
Animo a todo el que tenga algo de experiencia a completar/resolver/corregir/preguntar o lo que sea necesario para obterner una informacion lo mas acertada posible sobre esta motorizacion.
UN POCO DE HISTORIA:
Durante la segunda guerra mundial, la hélice con motor de combustion interno había llegado a sus limites, el limite principal es que la punta de la pala alcanzaba velocidades superiores a la del sonido, y eso tiene muchos problemas, se partian, existencia de resistencias parasitas muy fuertes y probablemente otras mas. La solucion fue reducir el diametro de la pala, aumentar el numero de palas (para compensar la falta de diametro) y entubarlas para evitar las turbulencias de las puntas de las hélices para así aumentar el rendimiento.
Esto duró muy poco, pues los motores no eran capaces de dar muchas rpms, ademas ya existian otras motorizaciones a priori mucho mas impresionantes como los pulso reactores o las turbinas, lo que desbancaron rapidamente a los Ducted Fans.
Un EDF (electric ducted fan) en RC no es mas que algo estético para poder hacer determinados modelos a escala, ya que en RC nuestras palas no llegan a la velocidad del sonido. En realidad es la motorizacion mas "mala" y cara para RC electrico.
Pros y contras de usar esta motorizacion:
Pros:
- Estetica.
- Sonido (es bonito el silbido).
- Posibilidad de volar jets a "bajo" precio.
- Aviones a escala.
- Velocidad alta. (lo que no significa que no se consiga lo mismo con hélice).
- El torque del conjunto motor es muy bajo.
Contras:
- Es la motorizacion electrica mas cara.
- El tiempo de vuelo es muy reducido.
- Aconsejable hierba para arrastrar la panza al aterrizar si no dispone de tren de aterrizaje.
- Nivel de pilotaje medio/alto.
- El modelo tambien suele ser algo mas caro.
SOBRE NUESTROS EDFs.
El principio de empuje del edf es el mismo que el de una helice, pero interviene ademas la presion entre camaras. Los elementos principales de nuestros edfs son (de delante a atras):
Intake ring: o anillo de entrada, mejora la entrada del aire en el tubo, facilitando la absorcion del aire y evitando turbulencias, no es mas que un semicirculo alrededor de la boca de entrada y que mejora el empuje estatico alrededor de un 25%!!!, El dinamico (volando en el aire) no le importa demasiado pues la misma velocidad del aparato en el aire le facilita el aire.
Este elemento no es necesario cuando el avion vuela a cierta velocidad por lo que se puede prescindir de el, ademas suele ser de quita y pon.
Tubo: el tubo no tiene porque ser igual en toda su longitud, por la parte de toma de aire (camara anterior) puede incluso ser un poco mas pequeño ya que el aire efectivo que cojeria es el diametro total menos el del cono del rotor, es decir, podriamos reducirlo como mucho, lo que el cono, algunos fabricantes hasta recomiendan siempre reducirlo un poquito si el tubo de entrada es largo ya que solventa unos problemas de turbulencias a la entrada aunque esto pocas veces lo he visto aplicado.
Por la parte del rotor siempre debe ser fijo y mientras mas ajustado al rotor mas rendimiento se obtiene al ser ambas camaras mas "estancas".
La parte de la salida puede o no estrecharse alrededor de un 10% del diametro interior del tubo y con no mas de 10º de angulo de reduccion, esto sirve para aumentar la velocidad del aire a la salida y la presion de la camara posterior ganando asi un poco de velocidad al avion, si no se pone se tiene mas superficie de empuje por lo que tardaria menos en cojer la velocidad maxima, que sera inferior que si estrechamos la salida.
Rotor: es obio decir que es la parte que gira y la mas importante en mi opinion, el materiral con el que esta construido es de suma importancia ya que cualquier deformacion debido a las fuerzas que esta sometido es una gran perdida de rendimiento, generalmente para motores de escobillas comunes suelen estar hechos de plastico, y para motores brushless potentes en fibra, nylon o carbono, si pusieramos un motor potente en uno de plastico suelen deformarse los alabes (pala de un rotor) expendiendose y rozando con el tubo ademas de deformarse hacia adelante, esto ultimo tambien le pasa a las helices convencionales.
El numero de alabes y paso del alabe suele esta calculado para una gama de rpms utiles, menos alabes suele ser para mas rpm, los shuebeler DS51 3ph solo tienen 3, esto es de lo mejorcito que hay en EDF en el mercado.
Suelen ponerle mas paso de alabe (pala) a motores de escobillas para compensar un poco la falta de rpms. Por lo que a priori si colocaramos un motor brushless (mas potencia y rpms) tiraria mucho, solo que el motor suele ir forzado y consumira mucho sin llegar a sus rpms optimas.
Estators: esta parte tiene 2 funciones, una aerodinamica y la otra de sujeccion del motor dentro del tubo.
Cuando al aire sale del rotor, éste sale girando, y esto es una perdida de potencia ya que nos entró sin girar, los estators tiene una forma casi como la de un alabe pero en sentido contrario, su funcion es hacer que el flujo de aire sea recto y no giratorio ganando rendimiento. El paso del estator es aproximadamente el mismo que el del alabe pero terminando una parte recta. El numero de estators optimos suele ser aproximadamente igual que el de alabes del rotor, generalmente tiene uno menos, pero depende del fabricante, pues mientras mas, mas caro será.
Cono de salida: es una pieza conica que se coloca detras del motor, su funcion es reducir las turbulencias que crea la parte trasera del motor optimizando el flujo del aire y por tanto el rendimiento, no todos los edfs comerciales lo traen, pero si en todos es necesario, si no viene deberiamos hacer un cono con cartulina, acetato o similar, yo los suelo agarrar al motor con celo, la longitud se suele poner un poco superior a la del motor.
CALCULOS
Ahora viene lo que mas interesa, que es colocar el EDF adecuado para nuestro modelo.
Generalmente lo que necesitamos en estas motorizaciones es obtener todo el empuje que podamos, pues suele ser velocidad lo que queremos, partimos tambien de que casi todos queremos volar aviones como un F16, F22, F5, airbus y por el estilo, es decir, aviones con una carga alar relativamente grande.
Se dice que la relacion peso/potencia para estos aviones es de entre 0.6 y 0.8 es decir si el avion pesa 1k pondriamos entre 600 y 800g de empuje estatico, esta claro que si tenemos mas, pues mejor, aunque este es uno de los parametros de la EDF, otro importante pero que nunca tenemos en cuenta es el flujo del aire que en el caso de la wemotec 480 (68mm) es de 26,2 qcm aunque tampoco es un parametro que se suela tener en cuenta, ademas de que pocos fabricantes lo dan.
Algunos fabricantes nos dan el rango de empujes de sus EDF en Newtons, ej, de 2 a 14N (wemotec 480) de empuje estatico, pasa nada, 10newtons = 1k aproximadamente, en el ejemplo 1.4k, esto siempre suelen darlo con el intake ring puesto.
Perdonad que os insista en este fan, pero es de los que hay mas datos ademas de estar mas que probada su eficacia, y tiene buena relacion calidad/precio/prestaciones.
Para obtener el empuje dada una EDF solo se necesitan rpms, hay una relacion entre empuje y rpms exponencial, un amuento pequeño en las rpm es un gran auemtno en el empuje,es decir, paracticamente de la mitad del stick en adelante es cuando el empuje de la edf es notorio y con un pequeño cambio en las rpm hay una gran variacion de empuje, podeis obserbar la grafica de la wemotec 480.
Partamos de que sabemos que EDF necesita nuestro avion, pues seguramente nos lo diga el fabricante, y tambien tenemos el peso y por lo tanto el empuje que necesitamos, ¿que motor y baterias pondremos en los programas de calculo?
Si sabemos que EDF tambien sabemos el tamaño del motor, para 55mm motores tamaño 280 o 300, para 70mm tamaño 400 o 480, para 90mm tamaño 600. como norma general. Si sabemos el tamaño tambien sabemos los amperios aproximados maximos que pueden aguantar, un 280 alrededor de 15A, un 400 alredeor de 30A, esto lo determina tambien las rpm/v del motor pero partamos de una base.
Se dice que P = V x I, potencia = tension (voltios) por intensidad (amperios), a nosotros nos interesa que el motor consuma lo menos posible (amperios) y que tenga la mayor potencia posible, asi que solo nos queda un parametro para aumentar, que es la tension, es decir, el numero de elementos.
El numero de elementos maximos suele decirlo el fabricante del motor, que suele andar por los 10 elemenos niMH o 3lipos, en algunos casos 12 elementos y en casos como motores lehner hasta 20 elementos. Asi que nosotros usaremos el numero de elementos maximos que no dice el fabricante.
Despues de tener en el programa de calculo el numero de elementos, pondremos una bateria de gran capacidad (despues arreglamos eso).
Tenemos ahora que elejir solo el motor, partiremos entonces de motores que den 3000rpm/v del tamaño adecuado para nuestro fan y pulsaremos el boton de ver los resultados, si los amperios de consumo que aparece es inferior a los que dice el fabricante pondremos un motor con mas rpm/v del mismo tamaño, si es al contario, bajaremos las rpm/v.
Cuando los amperios sean igual o ligeramente superior estamos sacando el maximo partido al motor. Esto se traduce tambien en el mayor empuje que se pueda obtener con ese motor, si este empuje no fuera suficiente para nuestro modelo tendriamos que colocar motores que soporten un mayor numero de elementos.
Tenemos ahora un consumo concreto, ej 30A, podemos ahora ajustar la bateria, la intensidad maxima que nos debe dar las baterias debe ser un 25% mas de lo que realmente vamos a consumir, y la bateria mas pequeña (por peso y tamaño) que nos daria ese consumo podria ser 1800mA 20C 3S1P, esa es, como minimo la bateria que deberiamos poner.
Si recalculamos ahora, tendriamos el tiempo maximo de vuelo con el motor al 100%, que por lo que suelo ver el minimo ronda los 3 o 4min, es decir, que ademas de ser una motorizacion cara, tenemos un tiempo de vuelo muy bajo.
El ESC debe de ser tambien almenos un 25% de amperios mas de lo que vamos a manejar.
YA TENEMOS TODO ELEJIDO.
Existe otra grafica, que es de potecia (watios) / empuje, esta grafica nos hara tener una idea de la potencia que vamos a manejar, y por tanto consumo que debemos hacerle al motor con cualquier numero de elementos, siempre que mantengamos la potencia.
Por desgracia solo las he visto con wemotec, podeis verlas aqui:
Son todas las graficas de fans wemotec.
http://www.awatson1.fsnet.co.uk/fandata.htm
Llegados a este punto, podriamos darnos cuenta que, a medida que aumentamos el numero de elementos, necesitaremos menos rpm/v en el motor, no porque no las queramos, sino porque para ese numero de elementos quemariamos el motor.
EJEMPLOS DE LA VIDA MISMA
El avion electrico con EDF mas rapido que he visto es el Vector II (ver foto), el tal shubeler (el mismo que fabrica los EDF) usó este avion con 20 elementos y uno de sus EDF el DS 51 para ponerlo a la nada despreciable velocidad de 295km/h!!!!, te cagas!!!!, otros aviones como el Blade 2 los he cronometrado a 220km/h que tampoco esta nada mal, solo que los tiempos de vuelo a esas velocidades dudo que llegen a 2min.
CATAPULTAS
Hay jets que llevan tren de aterrizaje, pero suelen ser los menos, suelen ser retractiles para que el avion sea mas limpo aerodinamicamente y mas bonitos esteticamente (mas caros) y ademas requiere el maximo de potencia para despegar (reduccion notable del tiempo de vuelo). Lo mas habitual es que sean modelos lanzados o a mano o con catapulta, los lanzados a mano suelen ser modelos poco pesados y la tecnica de lanzamiento es la misma que para otro modelo que no sea de EDF, (lanzamiento en linea recta).
He visto varios sistemas de catapultas, no son difíciles de hacer.
Roi import tiene en su web, personalmente me gustan las dos barras laterales y el pedal.
Pero lo que realmente es un problema es la goma pues aunque pudiera ser facil encontrarla no estariamos seguros de si sirve o no para nuestro modelo a no ser que algien ya la haya probado, se dice que las de latex son las mejores, el compañero "largoveleros" las ha probado y ya tenemos una referencia sobre las caracteristicas de la goma y que puede lanzar con ella, mas abajo hay un post.
En el mercado del RC solo he encontrado gomas de multiplex que ademas, estan principalmente pensadas para veleros, no porque no nos sirvan, si no porque los datos que nos dan de esas gomas son de veleros (envergadura y peso).
Si escribis en la web de multiplex www.multiplex-rc.de (puesta en español) "catapulta" os saldran 4 tipos de gomas segun el tamaño y peso del velero, yo compre la que es para veleros de 2k y la puse doble (no encontre la de 4k) y lanzo mi modelo aceptablemente por lo que puedo deducir que el peso de nuestro jet deberia ser almenos la mitad de los kilos que dice en la web, la goma de multiplex se suele estirar un 180%.
Ademas estas gomas estan protegidas con hilo, las de latex no lo estan.
He buscado un poco mas, y en la web de wemotec tienen gomas quirurgicas, no dicen los metros que son, pero si para el peso del avion que es, parece otra buena opcion.
En las catapultas para jets, la longitud de la goma la usan o de 15m o de 7.5m, yo, por seguridad use la de 15m (estaria tirando mas tiempo) y va bien, aunque supongo que igualmente bien podria ir la de 7.5m ademas de necesitar menos espacio.
catapulta.jpg (7.38 KiB) Visto 29602 veces
Al soltar el aparato es recomendable salir con la profundidad un poco tirandole hacia atras, y una vez que salga el aparato obserbar la tendencia y corregir.
Hay gente que dice que no se le da motor hasta que no suelte la goma, pero considero que no es del todo acertado, pues acelerar del tirion ademas del elevar el consumo por las nubes instantaneamente creará fuerzas que podrian desestabilizar el aparato si llevan un motor muy potente.
Recomiendo que se saga con el stick al 30% y cuando suelte la goma acelerar al 100% progresivamente pero rapido, no pegar un palancazo, siempre y cuando el despege se aga sin que el avion toque el suelo, pues podria entrar algo por el EDF y dañarlo.
PASANDO DE CURSO (electronica):
Estas cosas enganchan, y pronto nos daremos cuenta que queremos MAAASSS jejejeje
La electronica de un aprato que no sobrepase los 10 elementos generalmente es la clasica y de montaje clasico usando el BEC (battery eliminator circuit) del ESC pero ya con 10 elementos o mas la cosa suele cambiar, no hay BEC, los ESC no tienen BEC ¿¿porque?? pues facil, dentro del ESC con BEC hay una pieza basica 7805 o similar que estabiliza la tension que sea de la bateria a 5v pero claro que tiene un margen de entrada y que ademas mientras mas tension tenga la bateria, menos corriente para nuestros servos y receptor es capaz de entregar asi que se elimina esa pieza y ahora se utiliza bateria auxiliar, como si de un modelo de combustion se tratase.
Esto tiene la desventaja de aumentar el peso del modelo, pero tiene una gran ventaja que es la reduccion del ruido electrico en la alimentacion de nuestra electronica y tambien mas amperios para nuestros servos casi sin limite (lo que nos de la bateria).
Ademas, es recomendable utilizar receptores OPTO (optoacoplados) electricamente tiene el control de la bateria principal y motores aislado reduciendo aun mas el ruido en la alimentacion, (es impresionante lo sucia que es la alimentacion en un ESC con BEC vista con un osciloscopio).
Os dejo un esquema electrico del cableado de un biEDF con 12 elementos como por ejemplo un F22.
No vamos a ponernos con calculos de caida de tension o seccion, pues ya ha pensado la gente en ello y nos dicen los amperios que puede aguantar un cable, las secciones de cables y los amperios que aguantan sin entrar en profundidad, se puede generalizar para nuestro hobby así:
1mm2 -> 15A max
1.5mm2 -> 20A max
2.5mm2 -> 35A max
4mm2 -> 50A max
Otra forma de acertar con el cable es, poner el cable de la misma seccion que tiene el ESC tanto en la entrada como en la salida, claro esta que partiendo de que el ESC que hemos escojido es el adecuado.
Pero el cable de alimentacion tiene mas cosas, resulta que el amperaje quele sacamos a la bateria es pulsatorio, SI, una onda cuadrada, del maximo de amperios que le consume el motor, si miramos una onda cuadrada en un analizador de espectro nos damos cuanta que esta compuesta por muchas frecuencias puras cada vez de menos amplitud a medida que nos alejamos de la portadora, esto quiere decir que pudiera "putearnos" al receptor, sobre todo en motores de escobillas que ademas le salta chispa.
Podemos reducir este efecto notablemente con el simple hecho de trenzar los cables, SI, retorcerlos, esto esta mas que probado que reduce los ruidos, tanto que "salen" del cable como que "entran" a el, (al fin y al cabo el cable de alimentacion tiene una longitud X igual que la antena del receptor), de la misma forma el trenzado en los cables de los servos (motores de escobillas) es tambien aconsejable.
Yo incluso estoy usando cable apantallado de dos hilos mas malla cuando el servo está a cierta distancia del receptor, no es facil encontrarlo y es bastante rigido pero me da seguridad, aunque solo sea psicologica.
A veces, por seguridad, nos interesa usar la bateria auxiliar aunque nuestros ESC tengan BEC, tampoco pesa tanto una bateria 2/3 AAA.
En este caso, lo que debemos hacer es sacar el positivo (rojo) del conector de cada ESC y colocarle termo retractil para que no toque con nada.
Ahora los ESC toman la alimentacion de si mismos y el receptor y servos de la bateria auxiliar.
De esta forma se puede quemar el ESC que el aparato tiene control sobre los mandos, ademas de tener mas seguridad y amperios disponibles para los servos.
CONFIGURACIÓN DE LOS ESC
Partimos que debido a las exigencias de estas motorizaciones la intencion es simepre usar brushless, que ademas cada vez son mas asequibles.
Hay dos parametros de un motor y que no son controlados por el que muchos no saben que poner que son: el timming y la frecuencia.
El timing:
Es donde se produce la conmutacion del bobinado despues de haber sido detectada la nueva posicion del rotor (uff, no vea lo que he puesto), el motor para que gire, tiene que ir cambiando la corriente a cada bobina, y el que cambia esto es el ESC, que ademas es capaz de saber cuando tiene que conmutar a la siguiente y una vez detectado esta el timing, grados de giro a esperar para conmutar a la siguiente, lo que veria es la eficiencia frente a la potencia. Mas eficiencia (rendimiento) menos potencia y viceversa, aunque esto es minimamente no es tan "brusco" como parece, hablamos de un porcentaje bajo pero que siempre esta bien que se pueda optimizar.
Una tabla para mas o menos acertar puede ser esta:
-(2-5 degrees) optimum timing for Hacker Brushless Motors
-(10 degrees) optimum for Aveox or Astro motors and for Maximum RPM on Hacker Brushless Motors
-(18 degrees) optimum timing for Phaser, Mega, Plettenberg and for Maximum RPM on Aveox, Astro motors
-(30 degrees) optimum timing for AXI, Köhler or Actro motors and for Maximum RPM on Phasor, Mega, Plettenberg motors
He visto graficas comparativas de un mismo conjunto con dos configuraciones diferentes de timming y la verdad esque existia muy poca diferencia, es cierto que existia mas potencia con una pero de 20A subia a 21A o una cosa asi, un 5%, esto no determina nada en nuestro modelo EDF aunque yo lo ponia en el máximo.
Frecuencia:
Nuestros motores funcionan por la variacion de la frecuencia trifasica, pero esta frecuencia que nos dan a cambiar no se refiere a eso, sino a la frecuencia de la PWM que se le aplica además a la onda trifasica (complicao no?.
Yo hice algunas pruebas y no encontré diferencia alguna, pero teoricamente, mas frecuenca es para motores que giran mas lento (generalmente mas grandes) y menos para mas pequeños (o muchas rpm).
Podriamos usar esta tabla demasiado generica para mi gusto:
(8 kHz) optimum for Hacker Brushless Motors.
(16 kHz) for Aveox, Astro, Plettenberg, Phaser, Mega motors.
(32 Khz) for Köhler ,Actro
La frecuencia varia el par del motor, menos frecuencia, mas par y claro, mas consumo, se trata pues de llegar a un equilibrio entre el consumo y el par que parece estar en 16Khz, aunque usar 8Khz tambien nos vendria bien, al fin y al cabo, no hacemos mas que chupar una cantidad ingente de amperios con esta motorizacion.
Última edición por MrFlower el Vie, 10 Ago 2018 10:48, editado 20 veces en total.