- Mar, 06 Sep 2016 19:38
#1355957
Hola, se que esta sección se llama "Electrónica multirotor" pero es que en ningún otro lado se trata con la Naze32, si este no es el lugar ruego me digais donde preguntar sobre este tema.
El caso es que me compré una Naze32 Diatone, que no me gusta demasiado por el engorro de los cables pero es la que tengo, me he instalado el CleanFlight, he actualizado el ultimo firmware, he trasteado con mi emisora y leo todos los mandos en la pantalla, he hecho la instalación de toda la electronica poniendo la Naze32 en el ala, y conectando todo según me ha parecido entender aunque se que tengo que aprender muchísimo para afinarla.
Mi primera pregunta que puede ser incluso facil para cualquiera que haya usado el CF es que significa este esquema:
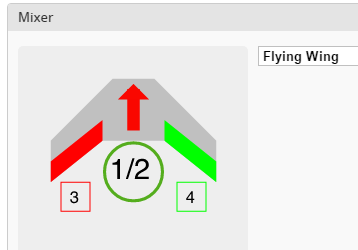 configuracionAla.png (6.48 KiB) Visto 3891 veces
he conectado el aleron izquierdo a la salida 3, el derecho a la salida 4 y como no se que significan el 1/2 he optado por dejar el motor enchufado directamente al receptor sin pasar por la Naze32.
configuracionAla.png (6.48 KiB) Visto 3891 veces
he conectado el aleron izquierdo a la salida 3, el derecho a la salida 4 y como no se que significan el 1/2 he optado por dejar el motor enchufado directamente al receptor sin pasar por la Naze32.
El resultado es que el canal 1 de la emisora se traslada a la salida 3, el canal 2 de la emisora se traslada a la salida 4 pero no funciona el modo ELEVON, asi que para volar puedo hacerlo (relativamente) girando la emisora 45º en sentido horario y casi, casi que funcionaria...
En cuanto a los movimientos de los alerones en función de la posición de la Naze32 (está puesta sobre el ala, apuntando hacia delante y calibrada antes de cada prueba) no veo que valga para equilibrarla durante el vuelo pero eso supongo que lo conseguiré cuando arregle antes cosas como el ELEVON.
Se me ocurre que quizá el ELEVON lo tenga que hacer la Naze32 y no haga falta configurarlo en la emisora... no se, son muchas dudas, a ver si alguien me aclara alguna.
Gracias por anticipado.
Air-Lucas
El caso es que me compré una Naze32 Diatone, que no me gusta demasiado por el engorro de los cables pero es la que tengo, me he instalado el CleanFlight, he actualizado el ultimo firmware, he trasteado con mi emisora y leo todos los mandos en la pantalla, he hecho la instalación de toda la electronica poniendo la Naze32 en el ala, y conectando todo según me ha parecido entender aunque se que tengo que aprender muchísimo para afinarla.
Mi primera pregunta que puede ser incluso facil para cualquiera que haya usado el CF es que significa este esquema:
El resultado es que el canal 1 de la emisora se traslada a la salida 3, el canal 2 de la emisora se traslada a la salida 4 pero no funciona el modo ELEVON, asi que para volar puedo hacerlo (relativamente) girando la emisora 45º en sentido horario y casi, casi que funcionaria...
En cuanto a los movimientos de los alerones en función de la posición de la Naze32 (está puesta sobre el ala, apuntando hacia delante y calibrada antes de cada prueba) no veo que valga para equilibrarla durante el vuelo pero eso supongo que lo conseguiré cuando arregle antes cosas como el ELEVON.
Se me ocurre que quizá el ELEVON lo tenga que hacer la Naze32 y no haga falta configurarlo en la emisora... no se, son muchas dudas, a ver si alguien me aclara alguna.
Gracias por anticipado.
Air-Lucas
FS TH9X
Mucho uso:
H8 - Ala Tornado
Poco uso:
Twinstar I (4) - FPV Raptor (0)
Pasaron a mejor vida:
Inferno
Mucho uso:
H8 - Ala Tornado
Poco uso:
Twinstar I (4) - FPV Raptor (0)
Pasaron a mejor vida:
Inferno

